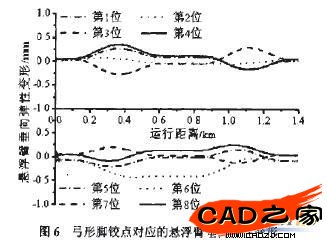
图5和6还表明悬浮架的弹性变形主要在缓和曲线段得到反映,在圆曲线上弹性变形有较大的复原,近似为一较小值。在直线段上悬浮臂弹性变形极小(为保持悬浮架初始不变形,已对其施加预应力),这是因为曲线线路横坡角在缓和曲线段逐渐变化,而在圆曲线上为一定值(扭转率为零)。在前缓和曲线段,前悬浮框正向扭转,后悬浮框反向扭转,在后缓和曲线段则刚好相反;前、后缓和曲线上悬浮架的扭转变形方向相反,这与缓和曲线理论是吻合的。
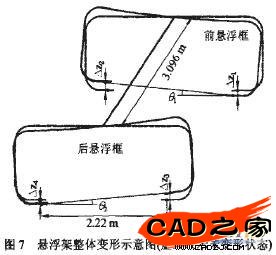
进一步分析可知,前缓和曲线段上悬浮架的整体变形效果如图7所示。图7中,AzI~Az4分别为悬浮框同侧两个弓形脚铰点的扭转弹性变形之和的一半,如△zI=(第1位全局变形-第1位悬浮臂变形+第3位全局变形-第3位悬浮臂变形)/2。为了定虽分析悬浮架的扭转变形,定义前、后悬浮框的近似扭转角计算公式如下:
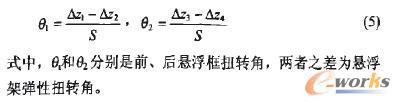
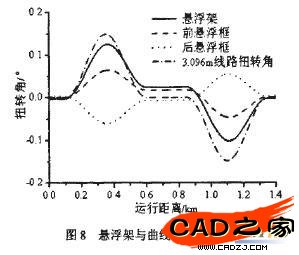
图8现实了按公式(5)计算得到的前、后悬浮框及悬浮架的近似扭转角以及悬浮架纵向长度内线路的近似扭转角(悬浮架中心处线路扭转率x3.096m)。图8表明,在缓和曲线段中点(线路扭转率最大),悬浮框和悬浮架扭转角最大,悬浮架最大扭转角约为0.125°,而3.096m长线路的扭转角约为0.149°,两者较为接近;前、后悬浮框的扭转方向刚好相反。上述分析说明悬浮架的弹性扭转及其自身更好的适应了扭转的曲线线路,同时也表明建立的弹性悬浮架模型是合理的,计算结果也是可信的。
5结论
(1)阐述了弹性悬浮架动力学建模在多体仿真软件中的实现原理,联合利用了CAD软件SolidWorks、有限元分析软件ANSYS以及多体动力学仿真软件SIMPACK,建立了包括车辆弹性悬浮架及其他刚体不见、点磁悬浮和导向控制系统的刚弹性整车动力学分析模型,为高速磁浮车辆系统动力学建模提供了新思路。
(2)仿真分析了曲线通过时悬浮架弹性变形动态相应。计算结果表明,高速磁浮车辆以250km/h通过半径2260m曲线时,在前缓和曲线段中点悬浮架发生最大变形,主要表现为悬浮絮的弹性扭转,最大扭转角约为0.1250,与悬浮架纵向长度内线路最大转角0.149°较为接近。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF