副标题#e# 引言
德国TR08磁浮车辆系统为减轻自重,大量部件采用了高强度、高弹性、低密度的铝铁合金材料。其中,悬浮架就是典型的弹性结构,其弹性变形对磁浮列车电磁铁运动解耦十分有利,特别是列车高速通过曲线时,弹性结构对系统的动态响应有着不可忽视的影响。然而,目前磁浮车辆系统动力学建模一般都将车辆考虑为多刚体结构。建立基于刚性车体和弹性悬浮架的磁浮车辆系统动力学模型.研究了控制算法对悬浮架动态解耦能力的影响。基于弹性悬浮架与多控制器耦合系统模型,研究了弹性悬浮架的机械解耦作用。但基于弹性悬浮架模犁的整车动力学研究尚未见相关文献发表。
本文联合利用CAD软件SolidWorks、有限元分析软件ANSYS以及多体动力学仿真软件SIMPACK,建立弹性悬浮架模犁和混合刚弹性磁浮车辆动力学模型,仿真分析了高速磁浮车辆弹性悬浮架曲线通过动态响应。
1弹性体动态响应计算原理
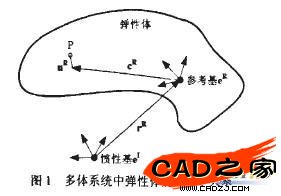
多体系统中弹性体七某点的全局运动包括弹性体刚体运动及其弹性变形;在小变形条件下,弹性体建模可独立于多刚体系统,弹性变形一般采用模态叠加法求解。弹性体上某点P的运动学关系如图1所示。图1中定义了惯性基eI和固结丁弹性体上的参考基eR,uR是P点弹性变形矢量,eR是P点未变形时相对参考系的位置矢量,tR为惯性系相对于参考系的位置矢量。P点的绝对位置矢量可表示为
r(t)=AR(rR+cR+uR) (1)
式中,AI是参考基相对于惯性基的方向余弦矩阵。
对公式(1)进行微分运算可得到P点的速度和加速度,由Green应变和Hooke定律则可得应力应变公式,又依据Jourdain虚功原理,可得公式(2)所示弹性体运动方程。
M(q)b+KΩ(Ω,q,q1)+Kq(q,q1)=F(r,A,q,…) (2)
式中,加速度矢量b包括了线加速度a、角加速度Ω1和弹性振动加速度q2,M是质量矩阵,KΩ为刚弹性耦合力项,Kq是弹性力项,F是外力矢量。
依据上述计算原理,SIMPACK软件提供了FEMBS接口模块.它需要输入的弹性体数据有:(1)相对于参考系的节点描述(坐标和自由度等);(2)质量矩阵、刚度矩阵和阻尼矩阵:(3)模态振型矩阵;(4)几何刚化矩阵及载荷向量。这些数据可通过有限元分析得到。
2弹性悬浮架有限元分析
2.1有限元建模
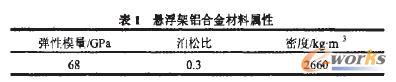
TR08磁浮车辆的悬浮架丰要由前后两个悬浮框和纵梁组成,悬浮框由左右两个C形悬浮臂和横梁组成,各部件之间通过螺栓连接或焊接而成,总质苗约1.32t。表1列出了悬浮架的铝合金材料属性。
首先,在SolidWorks中建立了悬浮架三维文体模型,建模时忽略板筋、凹槽、螺栓孔、倒角等不重要的细节。将实体模型调入ANSYS,选用实体单元Solid95和Solid92进行网格划分。需要说明的是,网格划分后的节点必须包括SIMPACK环境中悬浮架的关键点,如与其它刚体部件的铰点、约束节点以及需要获取结构响应的节点,这就需要采用平面切割法控制刚格划分。图2给出了悬浮架有限元模型,图中数字1~8是悬浮臂弓形脚上铰点的编号。
德国TR08磁浮车辆系统为减轻自重,大量部件采用了高强度、高弹性、低密度的铝铁合金材料。其中,悬浮架就是典型的弹性结构,其弹性变形对磁浮列车电磁铁运动解耦十分有利,特别是列车高速通过曲线时,弹性结构对系统的动态响应有着不可忽视的影响。然而,目前磁浮车辆系统动力学建模一般都将车辆考虑为多刚体结构。建立基于刚性车体和弹性悬浮架的磁浮车辆系统动力学模型.研究了控制算法对悬浮架动态解耦能力的影响。基于弹性悬浮架与多控制器耦合系统模型,研究了弹性悬浮架的机械解耦作用。但基于弹性悬浮架模犁的整车动力学研究尚未见相关文献发表。
本文联合利用CAD软件SolidWorks、有限元分析软件ANSYS以及多体动力学仿真软件SIMPACK,建立弹性悬浮架模犁和混合刚弹性磁浮车辆动力学模型,仿真分析了高速磁浮车辆弹性悬浮架曲线通过动态响应。
1弹性体动态响应计算原理
多体系统中弹性体七某点的全局运动包括弹性体刚体运动及其弹性变形;在小变形条件下,弹性体建模可独立于多刚体系统,弹性变形一般采用模态叠加法求解。弹性体上某点P的运动学关系如图1所示。图1中定义了惯性基eI和固结丁弹性体上的参考基eR,uR是P点弹性变形矢量,eR是P点未变形时相对参考系的位置矢量,tR为惯性系相对于参考系的位置矢量。P点的绝对位置矢量可表示为
r(t)=AR(rR+cR+uR) (1)
式中,AI是参考基相对于惯性基的方向余弦矩阵。
对公式(1)进行微分运算可得到P点的速度和加速度,由Green应变和Hooke定律则可得应力应变公式,又依据Jourdain虚功原理,可得公式(2)所示弹性体运动方程。
M(q)b+KΩ(Ω,q,q1)+Kq(q,q1)=F(r,A,q,…) (2)
式中,加速度矢量b包括了线加速度a、角加速度Ω1和弹性振动加速度q2,M是质量矩阵,KΩ为刚弹性耦合力项,Kq是弹性力项,F是外力矢量。
依据上述计算原理,SIMPACK软件提供了FEMBS接口模块.它需要输入的弹性体数据有:(1)相对于参考系的节点描述(坐标和自由度等);(2)质量矩阵、刚度矩阵和阻尼矩阵:(3)模态振型矩阵;(4)几何刚化矩阵及载荷向量。这些数据可通过有限元分析得到。
2弹性悬浮架有限元分析
2.1有限元建模
TR08磁浮车辆的悬浮架丰要由前后两个悬浮框和纵梁组成,悬浮框由左右两个C形悬浮臂和横梁组成,各部件之间通过螺栓连接或焊接而成,总质苗约1.32t。表1列出了悬浮架的铝合金材料属性。
首先,在SolidWorks中建立了悬浮架三维文体模型,建模时忽略板筋、凹槽、螺栓孔、倒角等不重要的细节。将实体模型调入ANSYS,选用实体单元Solid95和Solid92进行网格划分。需要说明的是,网格划分后的节点必须包括SIMPACK环境中悬浮架的关键点,如与其它刚体部件的铰点、约束节点以及需要获取结构响应的节点,这就需要采用平面切割法控制刚格划分。图2给出了悬浮架有限元模型,图中数字1~8是悬浮臂弓形脚上铰点的编号。

为了提高SIMPACK中模型的汁算效率,还需用子结构法将有限元模型凝聚为一个超单元。即通过定义一组节点的自由度作为丰自由度,缩减其它节点的自由度,再将缩减解扩展剑完整的自由度集上。其中,主自由度的选取遵循如下原则:(1)大质量、低频率:(2)保持结构的整体外形;(3)均匀分布;(4)保留关键节点自由度。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF