2基于SolidWorks-VRML实现虚拟现实的精确建模
2.1工业机器人简介
工业机器人是一种由程序预先确定其运动方式的机电一体化机械装置,由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成。工业机器人的机械系统可分为执行机构和驱动机构。
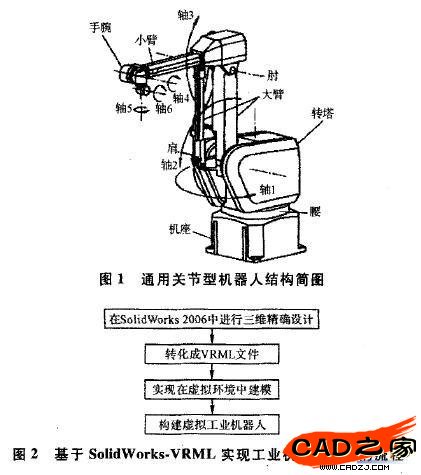
如图1所示,关节型工业机器人的执行机构-机械臂可由基座、旋转台、连接件〔大臂)及小臂、手爪等实体组成,是一个开链式的多连杆结构,始端连杆为机械臂的基座,末端连杆与机械臂的手爪相连,相邻连杆间以旋转关节或柱关节相连。机械臂可完成旋转、回转和伸缩这3种不同的动作形态。
2. 2工程实现
基于SolidWorks-VRML,在虚拟环境中实现工业机器人建模的流程,如图2所示。
2.2.1工业机器人三维模型精确设计
根据工业机器人的结构组成,可以将其分解成基座、旋转台、连接件(大臂)及小臂、手爪等实体模型。首先可利用SolidWorks强大的实体造型功能,实现零件的三维模型化。
在SolidWorks 2006中对基座的三维建模,如图3所示。基座是支撑和固定整个工业机器人的基础。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF