2.2基于COSMOSWorks的支杆有限元分析
动平台的运动范围是由超磁致伸缩作动器的伸缩量决定,从而获得纳米级的高精度运动.为了使动平台具有较好的动态特性和较高的固有频率,利用有限元分析软件COSMOSWorks对支杆模型进行频率分析.COSMOSXpress仅支持对固态单实体零件的分析,不支持对装配体、表面模型或多实体零件的分析.COSMOSWorks使用SRAC公司开发的当今世上最快的有限元分析算法--快速有限元算法(FFE),能够提供分析广泛的分析工具去检验和分析复杂零件和装配体,包含COSMOSXpress在内的更多高级分析功能.
支杆由超磁致伸缩材料做成的作动器及两端的柔性球铰构成,用SolidWorks建立三维模型,如图5所示,整个支杆模型用空间梁单元来模拟.

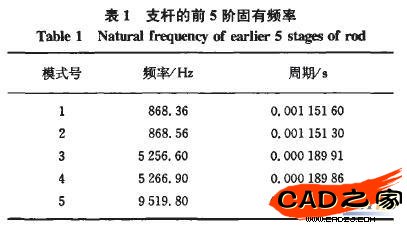
建立了有限元分析模型后,通过COS:MOSWorks分析支杆的固有频率和振型,频率数设置为5.前5阶固有频率见表一。
3 整体刚度分析和安全校核
3.1整体设计与装配
并联微动机构的运动副是材料为尼龙,尺寸为t=1mm,r=3 mm的柔性球铰;磁致伸缩驱动器的最大行程为45ηm,最大输出力为1 800 N,取每支杆上下端铰链中心杆长L为85mm;取上平台直径为120 mm,厚度为5 mm,下平台直径为200 mm.运用SolidWorks建立三维模型后进行装配.
并联微动机构主要由上下平台、弹性支杆、柔性铰链组成.将下平台作为整个机构的固定参考件,插入柔性铰链、弹性支杆及上平台时,均将其定义为相对于固定参考件的活动零件.除"同轴"、"重合"、"相切"等基本操作外,还利用SolidWorks中的"干涉检查"这一工具对6根支杆进行干涉检查.
3.2 基于SolidWorks的整体有限元分析
并联微动机构希望其工作空间满足以下要求:X轴最大行程≥士0.04 mm;Y轴最大行程≥±0.04 mm;Z轴最大行程≥±0.015 mm机构在受到杆件驱动,铰链传动后产生相应的变化,要确定这些变化对工作可靠性产生的影响,必须设定一个安全系数来界定.考虑零件的材料、工作的实际情况等因素,要求安全系数大于2.
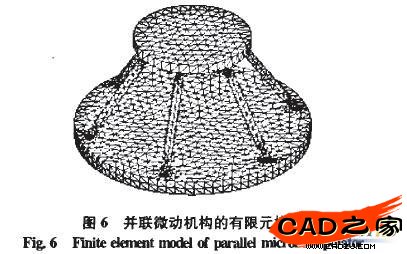
采用COSMOSworks进行整体刚度分析和安全校核.有限元分析程序将整个模型视为一个网状物,这个网是由离散的相互连接在一起的单元构成的.精确的有限元结果很大程度上依赖于网格的质量.对于需要精确计算的局部位置,采用加密网格可以得到比较好的结果.柔性铰链的最小厚度处容易发生应力集中及疲劳折断,在网格划分时对此处进行细分,整体有限元模型如图6所示.
COSMOSworks除了以图解的形式表达有限元结果,还可以将结果以数值的形式表示.动平台的运动结果如表2所示,同时还可计算出对应的刚度和安全系数.
由分析结果可知,X轴最大运动范围为±0.054 mm;Y轴最大运动范围为±0.057 mm;Z轴最大运动范围为±0.017mm,均达到设计指标.并联微动机构的法向刚度远大于切向刚度,法向安全系数足够大,虽然切向安全系数接近安全下限,整体工作在安全系数规定的范围内.

4 结论
在并联微动机构的设计中,采用柔性铰链来实现无摩擦无间隙的传动,以6个支撑杆件的移动副作为输入,采用磁致伸缩作动器作为支撑杆,同时作为驱动元件.借助SolidWorks虚拟三维设计及装配技术,能提高设计效率,缩短设计周期.运用其内嵌的COSMOSXpress和COSMOSWorks有限元分析处理模块对零部件和装配体进行分析,得到各种有用的参数,指导设计改进.
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF