副标题#e# 随着操作对象的日益微小化,微动机构在生物技术、微创医疗、激光制导、光纤对接等精细操作领域发挥着越来越重要的作用.为了适应纳米级精度的超精密加工需要,微动机构的体积需要进一步减小、结构需要进一步紧凑.运动副的间隙和摩擦成为影响机构精度的两个主要因素.针对这个问题对微动机构进行了柔性设计,将原有机构中的运动副全部用相对应的柔性铰链来替代,无间隙、无摩擦的柔性铰链是靠材料的弹性变形来实现微小的、等效的运动.借助有限元分析软件COSMOS对整个机构的关键部件--柔性铰链和驱动支杆进行有限元分析,获得修正和优化设计所需的信息.
1 基于COSMOSXpress的柔性铰链设计
SolidWorks为用户提供了初步的应力分析工具--COSMOSxpress,它可以判断目前设计的柔性铰链能否承受实际工作环境下的载荷.这不仅依赖于铰链采用的材料,而且还依赖于它的外形结构和尺寸大小.COSMOSXpress可以计算铰链的应力、应变和位移,其快速仿真能力避免了昂贵的实际测试,以最短的时间达到最优化设计.
并联微动机构通过柔性铰链的弹性变形实现工作台的运动,铰链作为主要的运动副对机构的整体性能影响很大,因此柔性铰链的选择和设计是整个柔性设计的关键.利用有限元分析软件COSMOSXpress,结合铰链强度、刚度、工作台动态特性等条件,合理设计柔性铰链的结构和尺寸,选择合适的铰链材料.
1.1铰链构型的选取
柔性铰链的结构有很多种形式,最常用也是最基本的形式是绕一个轴弹性弯曲,即单轴柔性铰链.初选两种单轴柔性铰链--柔性球铰(圆形截面铰链)和直圆柔性铰链(矩形截面铰链).通过有限元分析软件COSMOSXpress,分析材料为铝合金,最小厚度t和切割半径r的尺寸为t=2 mm,r=3 mm的两种不同截面铰链在最大受力下的位移和变形情况,如图l和2所示.
1 基于COSMOSXpress的柔性铰链设计
SolidWorks为用户提供了初步的应力分析工具--COSMOSxpress,它可以判断目前设计的柔性铰链能否承受实际工作环境下的载荷.这不仅依赖于铰链采用的材料,而且还依赖于它的外形结构和尺寸大小.COSMOSXpress可以计算铰链的应力、应变和位移,其快速仿真能力避免了昂贵的实际测试,以最短的时间达到最优化设计.
并联微动机构通过柔性铰链的弹性变形实现工作台的运动,铰链作为主要的运动副对机构的整体性能影响很大,因此柔性铰链的选择和设计是整个柔性设计的关键.利用有限元分析软件COSMOSXpress,结合铰链强度、刚度、工作台动态特性等条件,合理设计柔性铰链的结构和尺寸,选择合适的铰链材料.
1.1铰链构型的选取
柔性铰链的结构有很多种形式,最常用也是最基本的形式是绕一个轴弹性弯曲,即单轴柔性铰链.初选两种单轴柔性铰链--柔性球铰(圆形截面铰链)和直圆柔性铰链(矩形截面铰链).通过有限元分析软件COSMOSXpress,分析材料为铝合金,最小厚度t和切割半径r的尺寸为t=2 mm,r=3 mm的两种不同截面铰链在最大受力下的位移和变形情况,如图l和2所示.
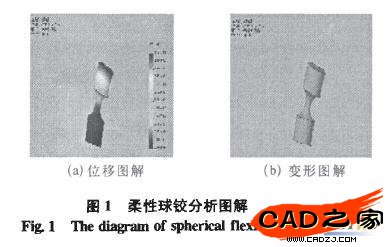

由位移图解可得:柔性球铰的最大位移为0.00478 mm,直圆柔性铰链的最大位移仅为0.00258 mm,说明柔性球铰的运动范围大于直圆柔性铰链.理想的柔性铰链要求其在工作方向上的刚度要小,其他方向上的刚度要大.从变形图解可知,柔性球铰在工作方向上的刚度远小于直圆柔性铰链,非工作方向的刚度很大.所以与直圆柔性铰链相比,柔性球铰可以增大铰链功能方向上的变形,减小非功能方向上的拉压扭转变形.
虽然柔性球铰和直圆柔性铰链都能满足微动机构的使用要求,但是柔性球铰可以绕任意轴转动,转动灵活性比较好,而直圆柔性铰链不仅转动灵活性较差,整体质量和体积也大于柔性球铰.微动机构对铰链的尺寸和体积的微型化提出了很高的要求,使用柔性球铰的微动机构易于实现微型化,符合设计要求.因此选用截面为圆形的柔性球铰.
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF