3.2运动仿真
3.2.1差速行驶状态仿真模拟
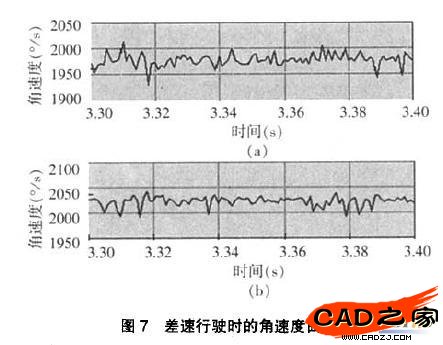
根据该差速器所用于车辆的行驶速度30~60km/h,经换算后得差速器的角速度一般为1200~2400°/s,因此将差速器壳旋转副速度设置为2000°/s。车辆转弯时,左右两驱动轮的阻力矩大小不同,所以应给两差速轮添加旋转方向与差速器壳方向相反的单作用力矩,其值分别为40N·m和20N·m。设置运动仿真时间为5s,帧数为5000,然后即可开始仿真运算。根据运算仿真结果,分别输出左右差速轮在3.3~3.4,时间段的速度曲线如图7所示,其中图(a)的阻力矩为40N · m,图(b ),的为20N·m。
由于仿真结果输出csv后,一以电子表格的形式输出了差速轮间隔0.001 s的角速度值,由此可求得左右两差速轮的平均角速度分别为ω1=1976.8°/s;ω2=2021.1°/s,二者的平均值为1998.95°/s,由此得ω1+ω2≈2ω0,这也验证了轴向滑块凸轮式差速器基本能够满足差速器的设计要求。
3.2.2直线行驶状态仿真模拟
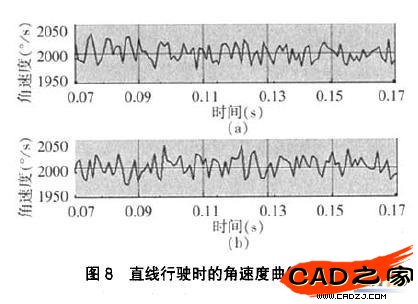
在差速行驶状态模型基础上,将两差速轮的单作用力矩大小都设置为30 N·m,其余参数设置都不变,这样即可进行直线行驶状态的仿真模拟。仿真时间设置为3s,帧数为3000,然后开始仿真运算。根据仿真运算结果,输出左右两差速轮0.07-0.17s时间段的速度曲线如图8所示,其中图(a)为左侧差速轮的角速度曲线,图(b)为右侧差速轮的角速度曲线。并由此输出csv后,以电子表格的形式输出了差速轮间隔0.001 s的角速度值,由此求得差速轮的平均角速度分别为ω1=2000.3°/s , ω2=2001.2°/s。由此得ω1≈ω2≈ω0,ω1+ω2≈2ω0。
4结束语
本文根据差速器的设计要求,应用Solidworks软件制作了轴向滑块凸轮式差速器主要零件的实体模型,并完成虚拟装配。然后利用SolidWorks插件工具COSMOSMotion软件,对该差速器进行了运动仿真。通过对各零部件的三维参数化建模、装配及运动仿真的有机结合,直观、形象地再现了差速器的工作过程,一获得了有关零件的运动特性,分析计算结果表明,当左右两差速轮的合阻力矩为60N·m,且两侧阻力矩差为20N·m或0 N·m时,有ω1+ω2≈2ω0。因此,可以认为轴向滑块凸轮式差速器基本能够满足差速器的设计要求。另外,本文为差速器的设计与研究提供了一种方法和捷径,在研发过程中应用这种方法可大大缩短差速器的研发周期,降低产品的研发成本,并为以后进一步对这一新型差速器的结构优化设计、制造及运动分析奠定了基础。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF