副标题#e# 1机器人示教编程方法的发展
机器人示教编程方式有两种:在线示教、离线示教。在线示教即手把手示教,简单方便,适用于大批量生产,所完成的任务简单单一,但是随着机器人适用任务的扩展和所完成任务的复杂程度的提高,在中小批量的生产中,用在线示教编程很难实现}z7。离线示教即脱离实际作业环境生成示教数据,间接地对机器人进行示教,对操作人员要求较高,使用也不太方便,尤其是在对机器人作业任务的描述上不能简单直接。虚拟示教编程充分利用上述两种示教方法的优点,借助于虚拟现实系统中的人机交互装置操作计算机屏幕上的虚拟机器人动作,经仿真通过后,记录示教点位姿、动作指令,将生成作业文件下载到机器人控制器,完成机器人的示教。
2弧焊机器人虚拟示教系统设计
该弧焊机器人示教系统主要分为四大部分,即实体建模、模型位姿调整、控制参数输人输出焊接机器人仿真示教等。
2.1弧焊机器人实体建模
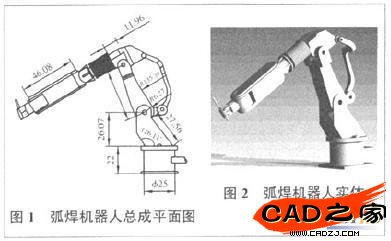
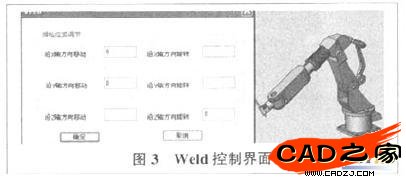
首先根据实际几何参数,利用SolidWorks的实体造型功能构建出弧焊机器人各零件、待焊工件和工作空间的三维模型,如图1、图2所示。
2.2控制部分程序设计
2.2.1 Weld控制界面DLL程序设计
本文应用Visual C++开发虚拟示教系统,使用Visual C++编译出来的DLL (Dynamic Link Library)作为SolidWorks的插件将程序集成到SolidWorks中。Visual C++的工程向导Swizard.swx给出了Solid Works的基本开发模板,使用前须先将Swizard.swx复制Visual C++安装目录CommonlMSDev98Template文件夹下。
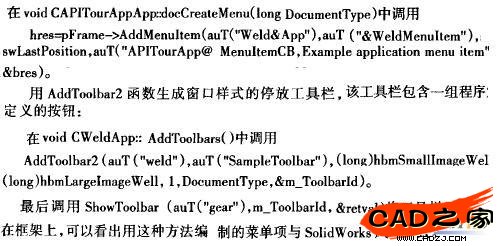
用向导创建一个名称为"Weld"的新DLL,插人对话框资源文件,使用编辑工具条在对话框上添加文本框、编辑框等控件,在对话框上点击右键选择类向导,为对话框创建一个新的类,然后为对话框的各个控件添加成员变量和成员函数并进行编辑,Weld控制界面如图3所示(程序代码从略)。
2.2.2对话框与SolidWorks的链接
用AddMenultem函数为当前下拉菜单添加菜单项或分割条
机器人示教编程方式有两种:在线示教、离线示教。在线示教即手把手示教,简单方便,适用于大批量生产,所完成的任务简单单一,但是随着机器人适用任务的扩展和所完成任务的复杂程度的提高,在中小批量的生产中,用在线示教编程很难实现}z7。离线示教即脱离实际作业环境生成示教数据,间接地对机器人进行示教,对操作人员要求较高,使用也不太方便,尤其是在对机器人作业任务的描述上不能简单直接。虚拟示教编程充分利用上述两种示教方法的优点,借助于虚拟现实系统中的人机交互装置操作计算机屏幕上的虚拟机器人动作,经仿真通过后,记录示教点位姿、动作指令,将生成作业文件下载到机器人控制器,完成机器人的示教。
2弧焊机器人虚拟示教系统设计
该弧焊机器人示教系统主要分为四大部分,即实体建模、模型位姿调整、控制参数输人输出焊接机器人仿真示教等。
2.1弧焊机器人实体建模
首先根据实际几何参数,利用SolidWorks的实体造型功能构建出弧焊机器人各零件、待焊工件和工作空间的三维模型,如图1、图2所示。
2.2控制部分程序设计
2.2.1 Weld控制界面DLL程序设计
本文应用Visual C++开发虚拟示教系统,使用Visual C++编译出来的DLL (Dynamic Link Library)作为SolidWorks的插件将程序集成到SolidWorks中。Visual C++的工程向导Swizard.swx给出了Solid Works的基本开发模板,使用前须先将Swizard.swx复制Visual C++安装目录CommonlMSDev98Template文件夹下。
用向导创建一个名称为"Weld"的新DLL,插人对话框资源文件,使用编辑工具条在对话框上添加文本框、编辑框等控件,在对话框上点击右键选择类向导,为对话框创建一个新的类,然后为对话框的各个控件添加成员变量和成员函数并进行编辑,Weld控制界面如图3所示(程序代码从略)。
2.2.2对话框与SolidWorks的链接
用AddMenultem函数为当前下拉菜单添加菜单项或分割条
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF