3模型库的建立
建立模型库是指给定非标准件基本参数,自动生成三维模型。例如在建立圆柱齿轮的三维模型时,只需要输人齿数、模数、螺旋角等几个参数后,就能在solidWorks中自动生成用户所需的三维模型。对于标准件可以把它的规格、型号放在一个数据库中,直接创建标准件数据库,注意数据库中数据的单位应该和计算过程中数据单位保持一致,避免逻辑错误,利用数据库当中存储的数据可直接建立三维模型。用ADO实现VC和数据库之间的数据读写,ADO中的编程模型一般由一个动作序列组成,步骤为:①接到一个数据源;②确定对该数据源的一个查询;③执行该查询;④把查询数据检索到一个能够在C++代码中很容易访问的对象中;⑤如果需要,则更新该数据源,以反映对该数据的编辑;⑥提供检测错误的一般方法。
对于连杆类等具有一系列尺寸的零件,只需要改变长短,无需改动其他尺寸。对于这类零件采用系列零件设计表技术,它是SolidWorks和Excel软件无缝集成的表现,先生成一个连杆,然后调用SolidWorks中的零件设计表模块,把变动的系列尺寸直接输入到Excel中保存起来,与此同时,在SolidWorks的环境管理器中生成与之对应的模型,当需要某长度的模型时,只需双击它重建模型即可马上生成。这样可以方便用户随时调用不同尺寸的杆件进行机构拼装用户在拼装机构的过程中如果没有需要的连杆或其他零件,那么可利用SolidWorks软件新建一个模型后把它放人到模型库中即可,因而不会受到实物的限制,灵活度非常高。
4机构方案的拟定及其评价方法
在拟定方案的时候,运用知识库中存储的信息对初始机构进行创新方案分析,如果以前有类似的方案,则用户可以继续使用,还可在此基础上进行改进创新,这样可以提高效率。对于以前没有的方案,首先可以从机构的功能目标人手,按其工作原理拟订方案,其次对机构进行选型组合。例如,可以完成匀速转动的机构有:连杆机构、齿轮机构、行星轮系等;用于非匀速转动的机构有:连杆机构、非圆齿轮机构、挠性件传动机构;往复移动的机构有:连杆机构、齿轮齿条机构、凸轮机构、楔块机构、螺旋机构等。一般情况下,可以找到相应的机构来满足用户需要的运动。在确定基本机构后,要对基本机构进行组合,机构的组合是指在机构选型的基础上,根据功能目标或工艺动作的各种需要,组合创新机构系统。对于已经给出的方案有以下5方面评价内容:功能性、经济性、安全性、可操作性、舒适性。其评价方法是:采用各种功能指标量化法,即把参评的各项功能指标分别乘以加权系数制定出评价函数:先列出每一项评价指标并把它进行量化,然后根据每项指标的重要程度分别赋予不同的加权系数:
在具体实施方案时,用户画出机构简图,从模型库中调人所需的模型进行虚拟装配,让系统按标准对机构方案进行分析验证,检查其是否达到满意的程度,如果满意则可以进行实际装配,否则,重新选择或者改进方案,重新虚拟装配直到得出满意的运动方案为止。
5虚拟装配与构件之间的干涉检测
用户根据已经选定的机构运动方案确定需要用到的各种虚拟零件,将他们共同保存在磁盘的某一个文件夹中,打开SolidWorks软件,新建一装配体文件,将选好的零件依次插人到装配体文件中,在零件之间添加相应的装配配合关系即可。例如:零件之间是通过铰接装配,则可添加转动副;如果是平面接触,则添加移动副。各构件之间的装配关系及其运动副关系定义如下:若是转动副,则在两零件连接处添加端面贴合和同轴心关系;若是移动副,则在两零件接触处添加平面贴合关系。机架和导轨等固定不动的构件通过右击SolidWorks特征管理树(Feature manager)中相应零件的实体名,在弹出的菜单内选择"固定"来实现。由于SolidWorks是基于Windows开发出来的,并且它含有尺寸驱动功能,用户利用这个功能可以对已经建好的装配模型随时修改。当它修改某一个尺寸时,其他的一些关联尺寸也会随之发生相应的改变,而不必拆卸零件重新装配,这在实物装配中是不能实现的。完成虚拟装配后进行干涉检查,例如,检查一个平面连杆机构在同一平面的两个转动副之间是否发生位置千涉,直观检查干涉情况的方法是拖动其中某个构件观察各构件在运动中是否发生位置重叠或者杆件之间是否发生碰撞,如果发生这种情况,则需要调整机构中的某些参数使之避免干涉。
6机构的运动与动力仿真
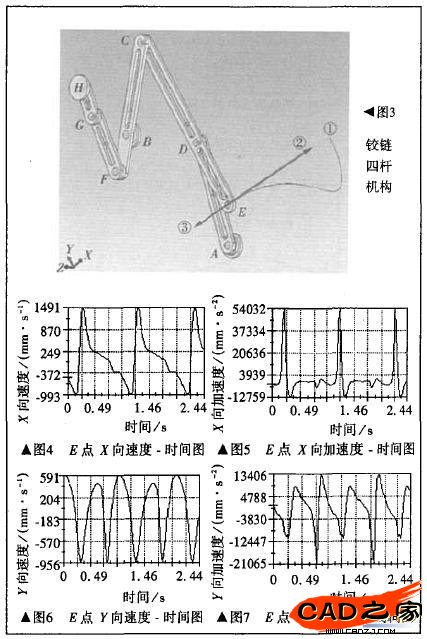
机构的运动仿真是指在每一运动时刻,各个构件在空间中的位置用计算机实时显示出来。其方法有两种:①图解法,把每一个时刻机构的状态绘制出来,通过它来确定机构某点在此刻的位置,这种方法的精度不高;②解析法,它是根据机构的几何关系利用封闭矢量的方法计算出点的位置。因而,运用解析法和计算机相结合就可以计算出杆上某一点不同时刻的不同位置。由于各个构件在原装配关系中有各种约束关系,机构本身特性也就确定了,而机构固定不动的零件放在空间的任何位置不会改变机构上某点运动轨迹的形状。完成运动分析之后,为了判断所设计机构特性的优劣,需要对机构的动力特性加以分析,提取感兴趣点进行位置、速度和加速度分析以便作出机构特性优劣的最后评判。如图3所示曲线①是E点的运动轨迹,带箭头的直线②为E点瞬时速度方向,带箭头的直线③为E点瞬时加速度方向。图4一图7分别是E点X向速度、加速度和Y向速度、加速度图。
7结论
虚拟机构创新实践系统可以帮助用户快速地完成设计任务,通过可视化的运动和动力学分析,在线对机构方案进行修改,从而整理出最优的方案。因此,本系统可以培养用户对机构运动方案的整体认识,培养用户的创新意识、综合设计及工程实践动手能力。用户在机构拼装的过程中熟悉机构及机械设计中出现的典型问题,通过分析,解决问题,可以把运动方案中的一些基本知识点融会贯通,对机构系统的运动特性有一个更加深人的理解。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF