3.仿真试验结果分析
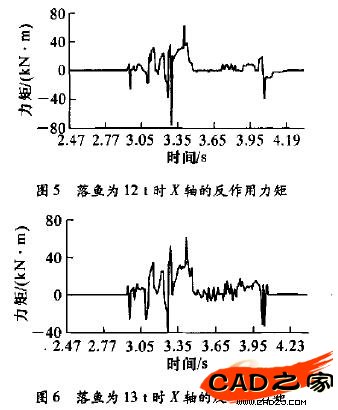
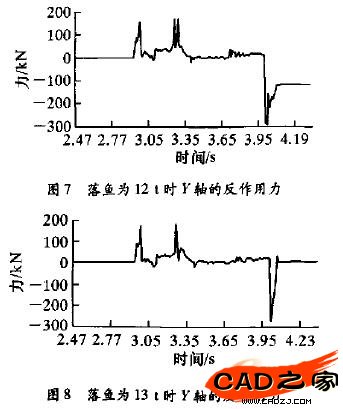
图5-8为落鱼质量分别是12,13t时的仿真结果。
对于整个倒扣捞矛而言,重点零件是胀扣套。针对胀扣套2种不同情况的仿真结果进行分析,可以了解倒扣捞矛的工作性能。从图5,6可以看出,仿真将近3s时,胀扣套旋人落鱼水眼,与落鱼发生碰撞,旋转速度减慢,进行螺纹配合,在3.5s时,两者最大反作用力矩达到60kN·m;3.5s以后图5的曲线比图6稳定。从图7,8可以看出,前3s是倒扣捞矛下放过程,随后胀扣套进人落鱼,与落鱼发生剧烈碰撞;4s以后是打捞提升过程,落鱼质量为12t时胀扣套最大反作用力约为120kN,而当落鱼质量为13t时,胀扣套螺纹无法承受如此大的拉力,不能提升落鱼。因此,试验设计的倒扣捞矛只能打捞小于或等于12t的重物。若所要求的载荷条件增大,可适当改变倒扣捞矛的相应尺寸参数,进行仿真优化。最终达到条件要求。
4.动态干涉检查
从数学角度来说,干涉检查就是求交运算,即对生成的三维实体进行布尔运算,利用求交运算来判断三维实体是否干涉。目前,运用于实践的动态干涉检测技术主要有单步检测和扫描实体。单步检测是在给定轨迹上反复利用静态干涉检测,即在物体移动过程巾将轨迹分为很多时间步,在每一个时间步都进行静态干涉检测,判定运动物体之问是否发生碰撞。扫描实体是指物体运动产生的扫描实体,代表了物体在给定轨迹上移动所占有的休积空间。如果它们在各自的轨迹上发生碰撞,则其各自的扫描实体将会静态干涉。在COSMOSMotion插件中智能运动构建器下的干涉检查属于单步检测。对倒扣捞矛在打捞仿真过程后的整体进行干涉检查,发现并无任何干涉现象。
结束语
通过对ZDM型钻具倒扣捞矛打捞作业进行仿真实例可以看出,利用机械动态仿真软件COSMOSMotion提高了井下工具设计的形象性、直观性,大大简化了井下工具的设计开发过程,提高了产品的设计质量和设计效率,有效降低了开发成本,为井下工具的研制提供了崭新的设计方法。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF