副标题#e# 引言
依据不同油田的油井、不同的开发和开采工艺、以及油井的不同工作状态,需要在井中下放不同的井下工具进行操作,因而井下工具的设计与试验一直是油田开发中的一个重要技术间题。运用仿真技术对井下工具工作过程进行动态模拟,不仅可以观察工具在井下的整个工作过程,而且还可以在虚拟环境下修改结构和进行性能分析,既缩短井下工具的开发周期,又降低开发成本。尤其是三维仿真软件的应用与普及,使三维设计具有形象、直观、精确、快速的特点,在产品开发的方案设计、结构分析、产品性能的评估、确定和优化物理样机参数的过程中能够起到决定性作用。笔者借助SolidWorks软件无缝集成的机构运动仿真软件COSM05Motion,对ZDM型钻具倒扣捞矛进行运动仿真实例分析,展示了现代动态设计工具软件在石油机械设计中的应用方法,将井下工具设计、装配、样机运转、性能测试和设计改进完全在虚拟环境中进行,为井下工具的研制提供了崭新的设计方法。
COSMOSMotion的特点
COSMOSMotion是SolidWorks的CAE应用插件,是广大用户实现数字化功能样机的优秀工具,是一个全功能运动仿真软件。它可以建立复杂机构运动模型,得到系统中各零部件的运动情况(包括位移、速度、加速度和作用力及反作用力等),并以动画、图形和表格等多种形式输出结果,还可将零部件在复杂运动情况下的复杂载荷情况直接输出到主流有限元分析软件中,从而进行正确的强度和结构分析。它具有如下功能:
(1)支持多种约束,包括转动副、移动副、圆柱副、球面副、万向副、螺旋副、平面副和固定约束。还支持共点、共线、共面、平动、平行轴、垂直等虚约束。可分别按位移、速度或加速度添加各种运动,包括恒定值、步进、谐波、样条线和函数等运动。
(2)可以模拟系统各种受力情况,包括拉压弹簧和扭转弹簧、拉压阻尼和扭转阻尼、作用力、作用力矩、反作用力、反作用力矩和碰撞力等。还具有独特而实用的接触(点线接触、线线接触)和藕合定义功能。
(3)可以将结果输出为通用的AVI格式动画,也可以输出到Excel表格中,以表格或图形的形式显示数据,还可以输出为Text文件。另外还有功能强大、内容丰富的各种XY图形输出。
ZDM型钻具倒扣捞矛的结构和工作原理
ZDM型钻具倒扣捞矛由矛体、胀心轴和胀扣套组成(见图1)。矛体上部为反(正)扣钻杆接头螺纹,矛体与胀心轴由螺纹联接,胀扣套装配在胀心轴的外锥体上,胀心轴下部有引导锥,便于胀套与落鱼接头螺纹对扣,另外服扣套在上提拉力作用下,可牢牢地抓住落鱼。若上部钻具为正扣,则工具上部也应为正扣。
落鱼鱼顶应有与倒扣捞矛下部螺纹相配合的完整内螺纹。在倒扣捞矛打捞作业时,ZBM型钻具倒扣捞矛山反扣钻杆沿着井璧慢慢送入井下。当引锥插人落鱼水眼之后,正转5-6转,使胀扣套与落鱼上部接头螺纹旋合。上提倒扣捞矛,胀扣套被胀心轴撑大,紧紧地与落鱼接头螺纹配合。上提拉力需大于倒扣捞矛本身的重力与落鱼重力之和。
ZDM型钻具倒扣捞矛虚拟样机打捞仿真实例
1.打捞过程仿真步骤
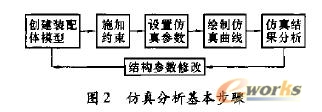
对ZDM型钻具倒扣捞矛虚拟样机进行运动仿真的基本步骤如图2所示。
2.打捞过程仿真模型与试验
要对ZDM型钻具倒扣捞矛进行仿真,首先要建立它的装配模型。用SolidWorks软件建立三维装配体模型的方法有2种:①先建立零件,然后使用配合技术对各构成零件进行组装,建立装配体,即自底向上的装配体建模技术;②直接在装配体模型中根据零件特征和尺寸关联建立起各个构成零件,即自顶向下的建模技术。这里采用前一种方法,即利用SolidWorks提供的智能配合技术先建立ZDM型钻具倒扣捞矛装配休模型,然后再完成整个模型的装配。
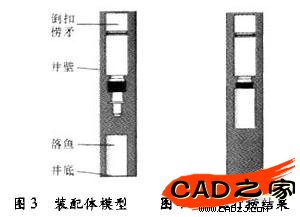
如图3所示,该装配体模型主要由倒扣捞矛、井壁、落鱼和井底4部分组成。倒扣捞矛设计总长为570mm,最大外径为121mm。设计带内螺纹的圆筒来模拟落鱼。经分析,井下压力和温度对该仿真系统影响很小,可忽略。
依据不同油田的油井、不同的开发和开采工艺、以及油井的不同工作状态,需要在井中下放不同的井下工具进行操作,因而井下工具的设计与试验一直是油田开发中的一个重要技术间题。运用仿真技术对井下工具工作过程进行动态模拟,不仅可以观察工具在井下的整个工作过程,而且还可以在虚拟环境下修改结构和进行性能分析,既缩短井下工具的开发周期,又降低开发成本。尤其是三维仿真软件的应用与普及,使三维设计具有形象、直观、精确、快速的特点,在产品开发的方案设计、结构分析、产品性能的评估、确定和优化物理样机参数的过程中能够起到决定性作用。笔者借助SolidWorks软件无缝集成的机构运动仿真软件COSM05Motion,对ZDM型钻具倒扣捞矛进行运动仿真实例分析,展示了现代动态设计工具软件在石油机械设计中的应用方法,将井下工具设计、装配、样机运转、性能测试和设计改进完全在虚拟环境中进行,为井下工具的研制提供了崭新的设计方法。
COSMOSMotion的特点
COSMOSMotion是SolidWorks的CAE应用插件,是广大用户实现数字化功能样机的优秀工具,是一个全功能运动仿真软件。它可以建立复杂机构运动模型,得到系统中各零部件的运动情况(包括位移、速度、加速度和作用力及反作用力等),并以动画、图形和表格等多种形式输出结果,还可将零部件在复杂运动情况下的复杂载荷情况直接输出到主流有限元分析软件中,从而进行正确的强度和结构分析。它具有如下功能:
(1)支持多种约束,包括转动副、移动副、圆柱副、球面副、万向副、螺旋副、平面副和固定约束。还支持共点、共线、共面、平动、平行轴、垂直等虚约束。可分别按位移、速度或加速度添加各种运动,包括恒定值、步进、谐波、样条线和函数等运动。
(2)可以模拟系统各种受力情况,包括拉压弹簧和扭转弹簧、拉压阻尼和扭转阻尼、作用力、作用力矩、反作用力、反作用力矩和碰撞力等。还具有独特而实用的接触(点线接触、线线接触)和藕合定义功能。
(3)可以将结果输出为通用的AVI格式动画,也可以输出到Excel表格中,以表格或图形的形式显示数据,还可以输出为Text文件。另外还有功能强大、内容丰富的各种XY图形输出。
ZDM型钻具倒扣捞矛的结构和工作原理
ZDM型钻具倒扣捞矛由矛体、胀心轴和胀扣套组成(见图1)。矛体上部为反(正)扣钻杆接头螺纹,矛体与胀心轴由螺纹联接,胀扣套装配在胀心轴的外锥体上,胀心轴下部有引导锥,便于胀套与落鱼接头螺纹对扣,另外服扣套在上提拉力作用下,可牢牢地抓住落鱼。若上部钻具为正扣,则工具上部也应为正扣。

落鱼鱼顶应有与倒扣捞矛下部螺纹相配合的完整内螺纹。在倒扣捞矛打捞作业时,ZBM型钻具倒扣捞矛山反扣钻杆沿着井璧慢慢送入井下。当引锥插人落鱼水眼之后,正转5-6转,使胀扣套与落鱼上部接头螺纹旋合。上提倒扣捞矛,胀扣套被胀心轴撑大,紧紧地与落鱼接头螺纹配合。上提拉力需大于倒扣捞矛本身的重力与落鱼重力之和。
ZDM型钻具倒扣捞矛虚拟样机打捞仿真实例
1.打捞过程仿真步骤
对ZDM型钻具倒扣捞矛虚拟样机进行运动仿真的基本步骤如图2所示。
2.打捞过程仿真模型与试验
要对ZDM型钻具倒扣捞矛进行仿真,首先要建立它的装配模型。用SolidWorks软件建立三维装配体模型的方法有2种:①先建立零件,然后使用配合技术对各构成零件进行组装,建立装配体,即自底向上的装配体建模技术;②直接在装配体模型中根据零件特征和尺寸关联建立起各个构成零件,即自顶向下的建模技术。这里采用前一种方法,即利用SolidWorks提供的智能配合技术先建立ZDM型钻具倒扣捞矛装配休模型,然后再完成整个模型的装配。
如图3所示,该装配体模型主要由倒扣捞矛、井壁、落鱼和井底4部分组成。倒扣捞矛设计总长为570mm,最大外径为121mm。设计带内螺纹的圆筒来模拟落鱼。经分析,井下压力和温度对该仿真系统影响很小,可忽略。
建好三维模型后,在装配模块下直接进人仿真环境。在进行仿真之前,应先进行与仿真相关的基本参数设置,如力的单位、时间单位,重力加速度大小,以及与动h1有关的帧时间间隔及帧数等。在本例的仿真中,设置力的单位是N,时间的单位是s,长度的单位是mm,仿真帧数为700(根据仿真精度要求可以适当调节时间间隔和帧数)。利用COSMOSMotion的智能运动构建器设置井壁和井底为静止零部件,落鱼和ZDM型钻具倒扣捞矛为运动零部件。静止零部件和运动零部件确立后,就可以设置零部件之间的运动关系,从而限制零部件的某些运动自由度,使其完成期望的运动。考虑倒扣捞矛上下往复运动,添加运动驱动,速度函数为IF(TIME-3:340,0,0)+IF(TIME-4:0,0,-340)。设置胀扣套旋转副为主运动,速度函数为STEP(TIME,2,OD,3,(STEP(TIME,3,-720D,4.1,(STEP(TIME,4.1,OD,6,OD)))))。考虑到胀扣套和落鱼为螺纹连接,设置它们之间为碰撞约束。为了真实模拟打捞过程,对系统中所有零部件都赋予了材料和质量,落鱼的质量可以根据试验要求自定义设置。所有内容设置完毕后就可以进行打捞过程仿真。对落鱼质量为10,12,13,15t4种打捞工况进行仿真试验。当落鱼质量为10,12t时,打捞成功;当落鱼质量为13,15t时,胀扣套螺纹失效,打捞失败。成功的打捞仿真结果如图4所示,落鱼被ZDM型钻具倒扣捞矛从井底打捞出来。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF