0前言
虚拟现实技术,是指基于自然方式的人机交互系统,通过计算机创建一种虚拟环境,使用户产生身临其境的感觉,并可实现用户与虚拟环境直接进行交互。
机器人技术是具有战略高度的前沿技术,它和生物技术、大型计算机技术、纳米技术一同被认为是未来科技发展的方向。国外机器人领域近几年发展的趋势之一就是:虚拟现实技术在机器人设计与制造中的应用已从仿真、预演发展到用于过程控制。对于虚拟环境中模型的建立,包括以下方面的研究内容:①基于微机的虚拟环境体系结构;②基干几何建模和计算机图形学的建模方法;③基于图像生成方法的建模。
本研究以此为应用背景,利用SolidWorks三维CAD软件,通过虚拟现实标准语言(VRML)建立虚拟环境中的实休模型,描述它们之间的结构关系,快速、真实地显示三维虚拟工业机器人。
1虚拟环境下的建模方法
在虚拟环境中建立三维模型是实现仿真控制的基础。
1.1虚拟现实建模方法
(1)采用VB,C++或VC++, OpenGL图形库等工具开发,则程序复杂,工作量很大,造型不方便,且图形效果不够逼真,效果不是很理想。
(2)采用虚拟现实软件(如:WTK,VRML)等工具开发,对于复杂三维图形的编程实现是很困难和费时的,而且达不到理想的效果。
(3)采用"一些商用建模软件十VRML"的建模方法。① 3DMAX + VRML;3DMAX能够导出保持部件间的各种关系的VRML文件。但3DMAX适合对虚拟环境进行三维建模(如校园、室内环境等),它在构造与修改机械产品的几何特征时操作上显得不够方便与快捷;② Pro/E +VRML;采用Pro/E+VRML方法来实现对虚拟设备的快速建模。Pro/E只支持VRML 1. 0的版本方式.而且所导出的文件丢失了原模型各部件间的各种关系等重要信息;③ SolidWorks+VRML; SolidWorks 2006版软件对VRML 2.0(ISO/IEC147722I;1997,通常称为VRML97)具有良好的支持作用,可以将建立好的零件模型直接导出为保持部件间的各种关系的VRML文件。本研究采用这种方法实现工业机器人在虚拟环境中的精确建模。
1.2 SolidWorks-VRML的建模方法
通过运用SolidWorks软件,采用符合国际标准的虚拟现实建模语言VRML为中间桥梁,经过一系列的变换、修改、输人、输出,形成.wrl格式的文件,大大减少了虚拟建模的工作量,提高了工作效率。下面简单介绍所用到的软件和语言。
1.2.1 SolidWorks软件简介
SolidWorks是世界上第1套基于Windows系统开发的三维机械设计CAD软件,它具有在机械产品设计中别具一格的特点和优势,即可采用参数化的二维模型快速生成同一类型、不同规格的系列产品,在建立机械产品的模型时显得格外的方便、快捷,尤其是SolidWorks2006版对VRML2.0提供良好的支持。
1.2.2虚拟现实建模语言
虚拟现实建模语言(VRML)是一种与操作平台无关的、基于3D Web的、描述可交互三维世界和对象的语言,它通过创建一个虚拟场景以达到现实中的效果。
由VRML创建的虚拟现实场景是模拟现实中的三维产品造型,具有面向对象的层次性、多感知性,虚拟世界的交互性、实时性和支持网络浏览等特点,而且由于VRML文件可以像HTML文档一样上传/下载,并可启动VRML浏览器来观看文档所描述的三维模型,很好地解决了信息交流与共享的问题。
2基于SolidWorks-VRML实现虚拟现实的精确建模
2.1工业机器人简介
工业机器人是一种由程序预先确定其运动方式的机电一体化机械装置,由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成。工业机器人的机械系统可分为执行机构和驱动机构。
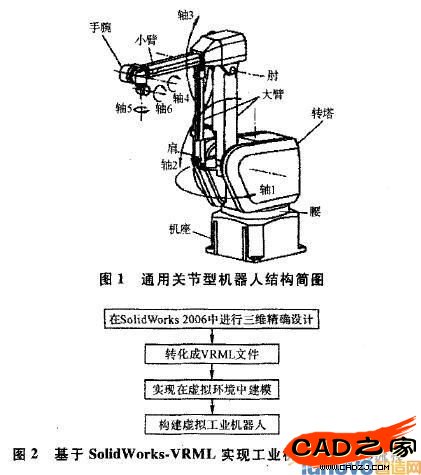
如图1所示,关节型工业机器人的执行机构-机械臂可由基座、旋转台、连接件〔大臂)及小臂、手爪等实体组成,是一个开链式的多连杆结构,始端连杆为机械臂的基座,末端连杆与机械臂的手爪相连,相邻连杆间以旋转关节或柱关节相连。机械臂可完成旋转、回转和伸缩这3种不同的动作形态。
2. 2工程实现
基于SolidWorks-VRML,在虚拟环境中实现工业机器人建模的流程,如图2所示。
2.2.1工业机器人三维模型精确设计
根据工业机器人的结构组成,可以将其分解成基座、旋转台、连接件(大臂)及小臂、手爪等实体模型。首先可利用SolidWorks强大的实体造型功能,实现零件的三维模型化。
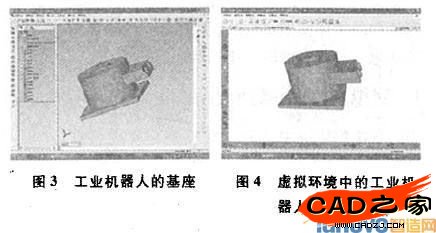
在SolidWorks 2006中对基座的三维建模,如图3所示。基座是支撑和固定整个工业机器人的基础。
2.2.2工业机器人在虚拟环境中建模
由于VRML造型具有较强的移植功能,具有便于网上传输、运动图像编程简单等特点,将其应用于在虚拟环境中实现工业机器人的建模。
在用SolidWorks 2006建立工业机器人三维实体模型后,利用SolidWorks 的VRML转换程序将其输出为VRML文件:"文件-另存为:保存类型----VRML(*wrl)-选项-文件格式:VRML-版本:VRML97,即可输出为VRML文件。
在Para11e1Graplue。公司的Cortona浏览器的基础上,在虚拟环境中构建可视的实体模型,如图4所示。Cortona浏览器功能十分强大,使用方便,能够直接插人Windows操作系统的IE浏览器中使用,而且3D效果、交互性能近乎完美,是目前使用最多的VRML浏览器。
2.2.3 虚拟工业机器人的构建
在虚拟环境中对工业机器人的各组成实体进行精确建模后,利用VRML作为建构的工具,再进行虚拟工业机器人的构建,这时就需要在源程序中对各实体模型加以修改。
在虚拟工业机器人的构建中,使用VrmlPad 2.1软件进行编程,ParallelGraphics公司的VrmlPad是一种功能强大且简单易用的VRML开发设计专业软件,支持VRML97标准。
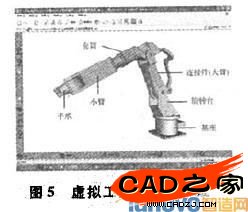
程序设计思想如下:采用嵌套式结构,建立Transform节点,每个Transform节点对应一个实体模型;实体模型的导人通过增加节点实现,将各实体模型的VRML文件作为Inline内联节点导人,同时这些节点逐层嵌套包含;虚拟工业机器人的虚拟装配由Transform节点的translation域、rotation域和scale域控制,进行平移、旋转和缩放变换,以达到外形尺寸的一致性,实现了工业机器人在虚拟环境中的构建(如图5所示)。
这种虚拟建模方法采用Inline内联节点的方式引人各实体模型的VRML文件,使VRML程序设计结构化、模块化、层次化,从而提高软件的设计质量;此外可以大大节省空间,减小文件的长度,为程序调试和定义
动画带来很大的方便;也可进一步用于各种支持VRML文件格式的开发程序(如.Tava,javaScript等)中,有利于对组成虚拟工业机器人的各实体模型再次进行脚本编程,实现运动控制的虚拟仿真。
3结束语
实体模型的建立是形成虚拟现实系统的基础,也是其最为关键的技术之一。利用SolidWorks-VRML实现虚拟现实的精确建模,大大减少了建模的工作量,提高了工作效率,更重要的是能够满足虚拟现实场景中对实体的精确度的要求,虚拟工业机器人模型的精确程度直接关系到过程控制的效果。
而VRML作为新的网络开发平台在机器人虚拟控制研究中具有广泛的应用前景,尤其是随着计算机网络技术的发展,为机器人远程虚拟遥控的研究开辟了一个新的途径。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF