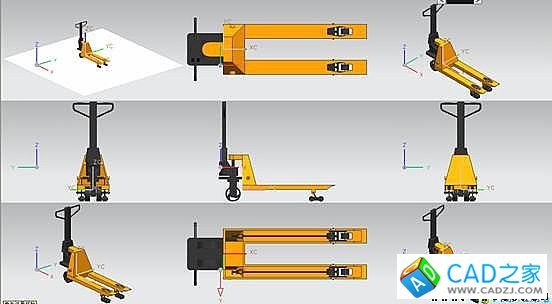
建模目标:运用UG建模模块建立手动叉车的三维模型。
效果预览:

建模步骤:
第一部分、车体外壳
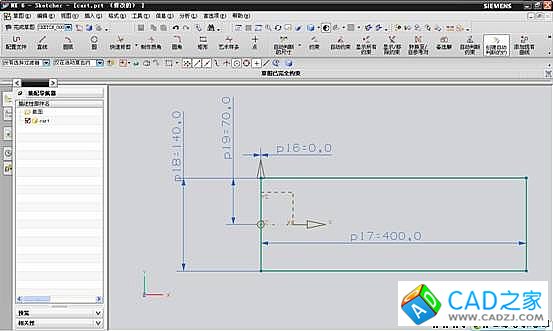
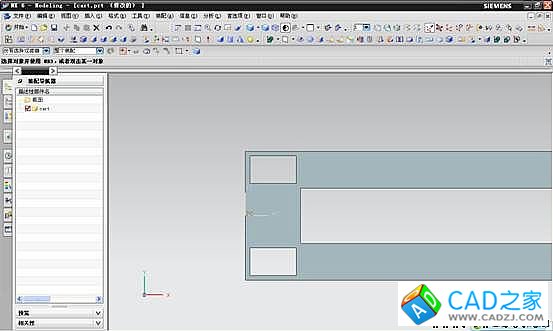
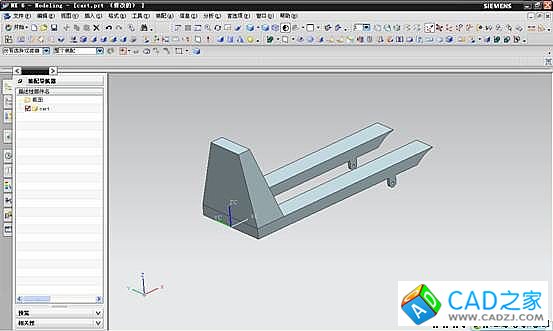
第一步、通过拉伸(拉伸距离20)建立壳体底部模型,见下图。
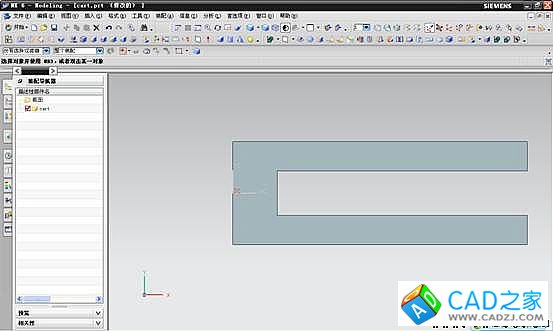
第二步、通过矩形腔体(长340,宽60,深20)建立叉车叉开部分,见下图。
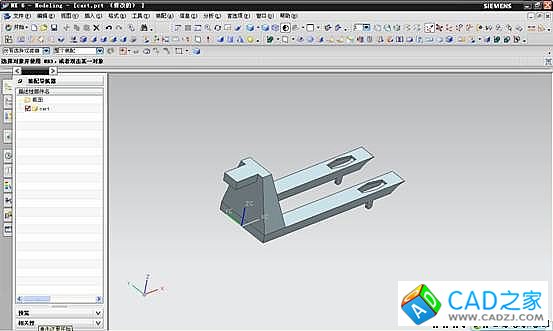
第三步、通过矩形腔体(长50,宽30,深20)命令,建立如下特征。
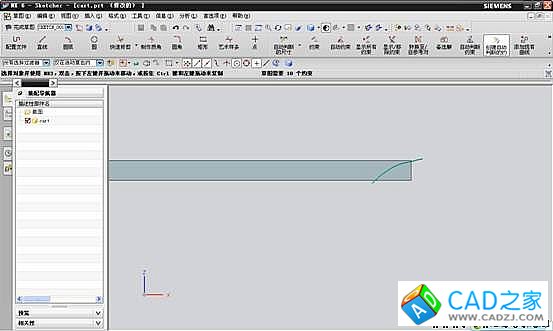
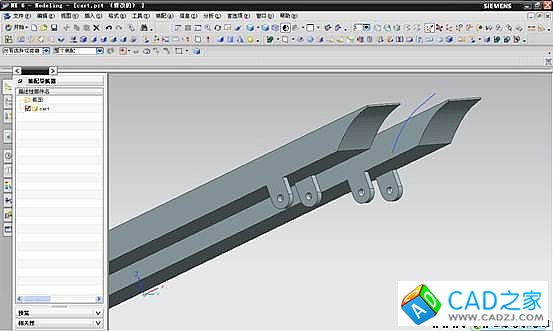
第四步、通过草图及修剪体建立车体外壳尾部特征,见下图。
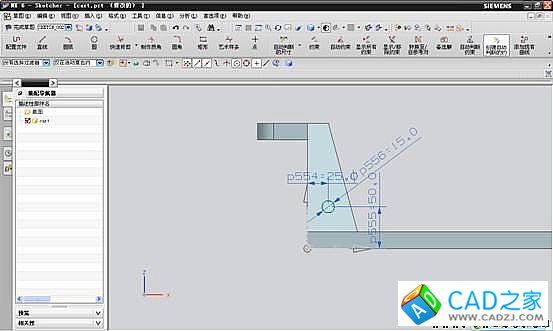
第五步、建立垫块(长15,宽5,高20),见下图。
对垫块进行边倒圆(半径7.5)及钻孔(孔径为5)处理,见下图。
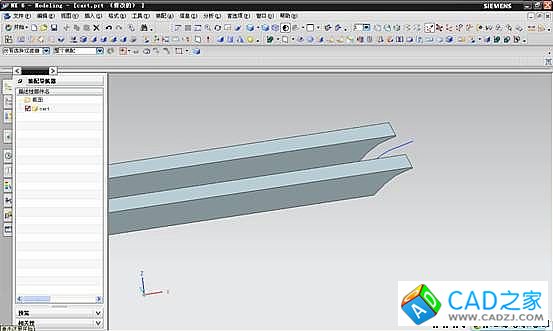
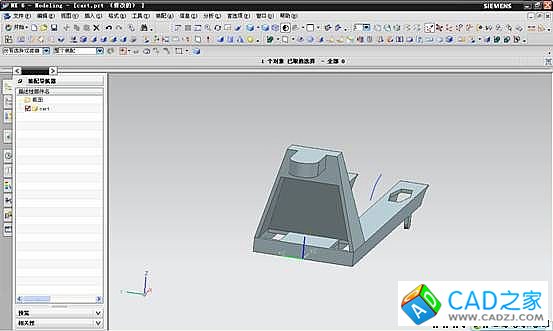
第六步、对叉车载重部分进行抽壳处理,抽壳厚度5,见下图。
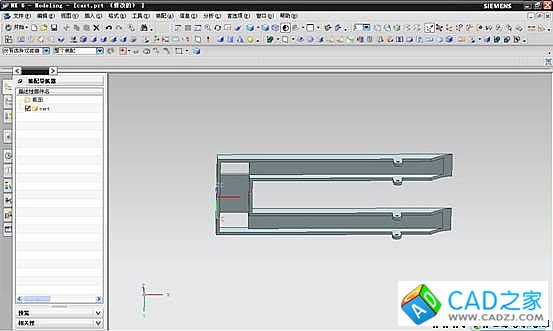
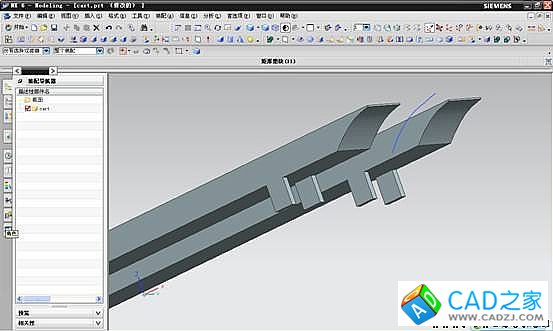
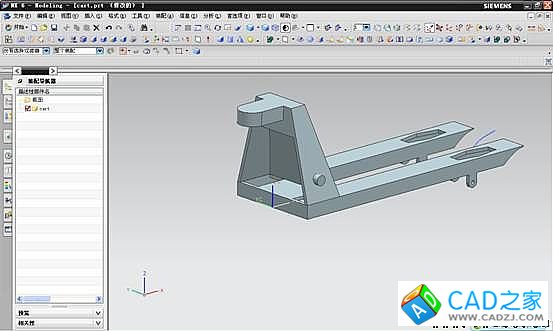
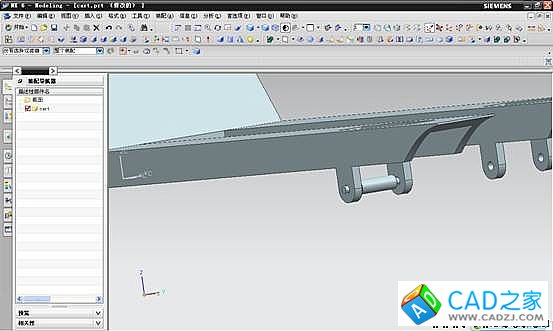
第七步、对车体外壳尾端进行拉伸及镜像处理,如下图所示。
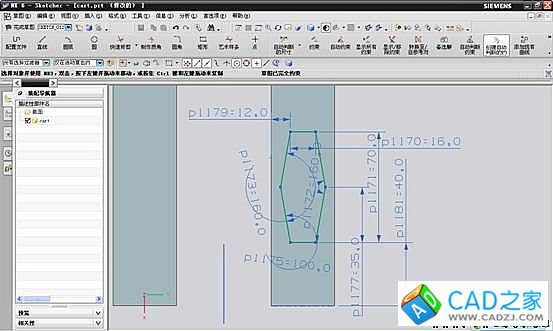
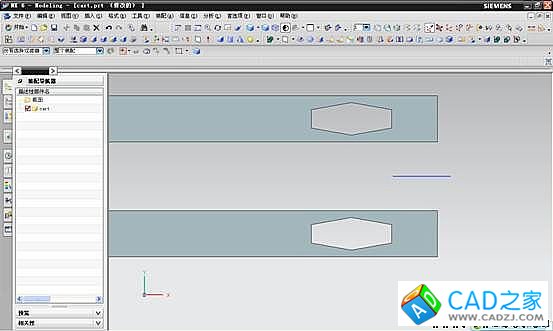
第八步、通过拉伸及拔模(拔模角度为10°)建立壳体前端模型,见下图。
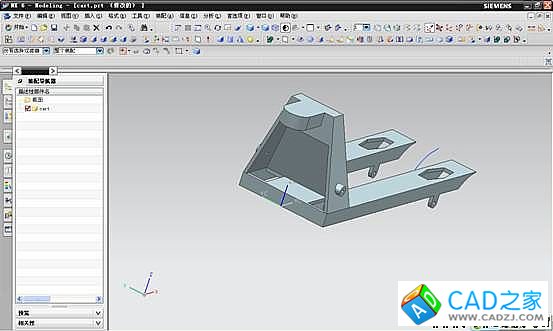
第九步、建立矩形垫块(40,20,60),见下图。
第十步、对上述垫块建立的特征进行边倒圆(半径20)及钻孔(直径15,深度15)处理,见下图。
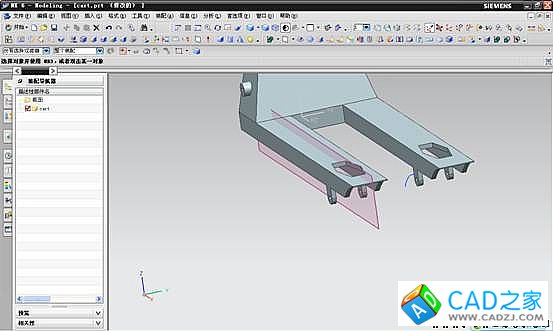
第十一步、对车体外壳前端进行抽壳处理,抽壳厚度为5,备选厚度为40,见下图。
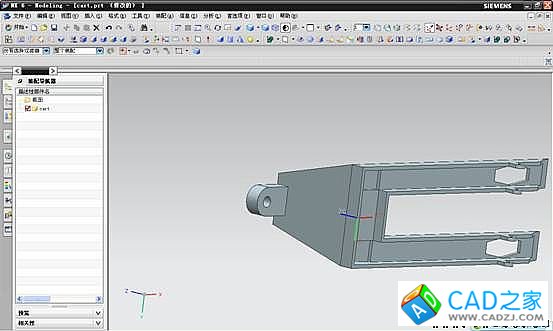
第十二步、通过拉伸建立车体外壳前端连接突出部,见下图。
第十三步、对外壳前端上的连接突出部进行钻孔(半径5,深度20)及镜像处理,见下图。
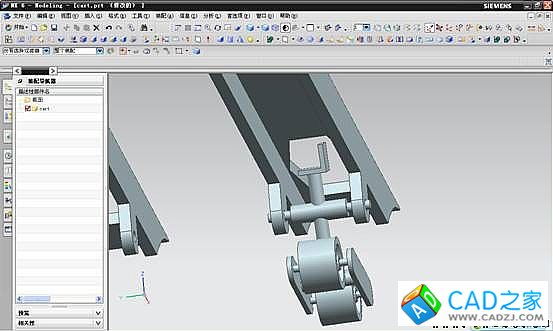
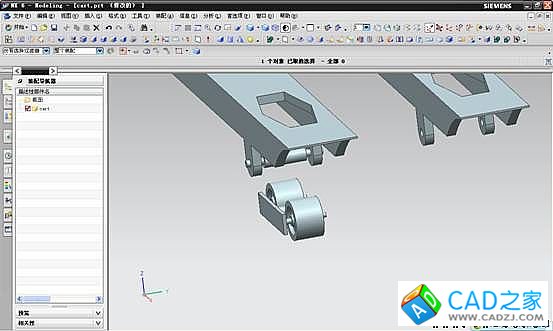
第二部分、传动轴及底盘
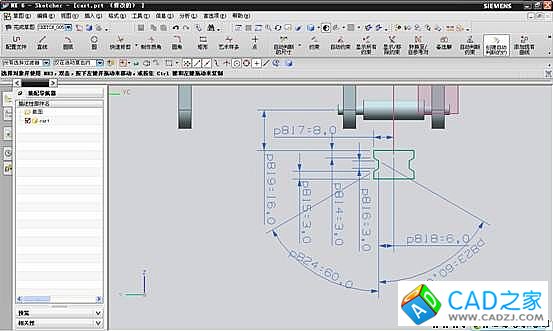
第一步、建立如下基准平面,如下图。
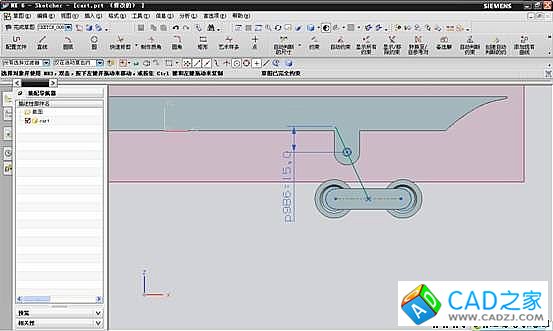
第二步、通过拉伸(对称值,22;对称值,12)建立从动轮连接轴的连接栓,见下图。
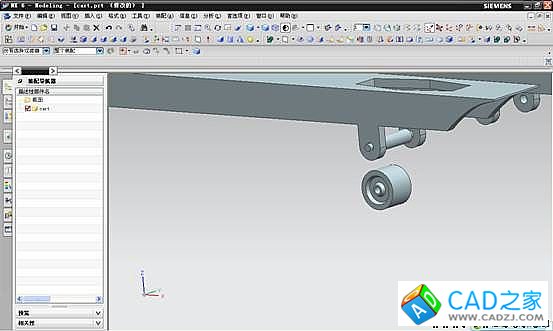
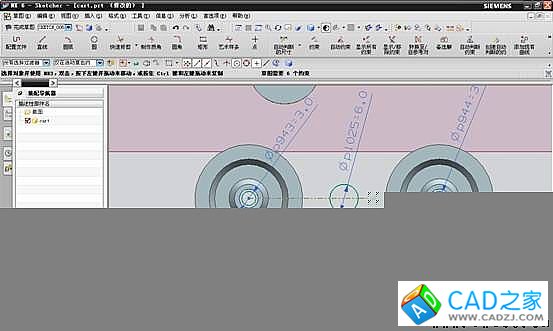
第三步、通过回转建立从动轮,接着钻孔(直径4),见下图。
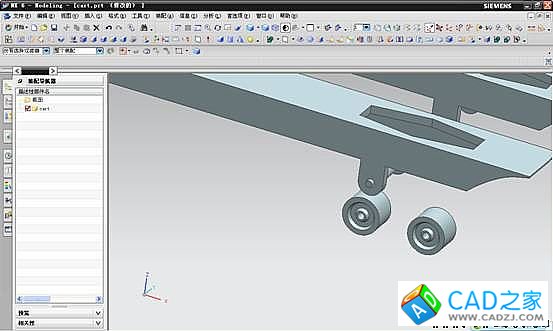
第四步、运用引用几何体命令(距离40)建立另一个从动轮,见下图。
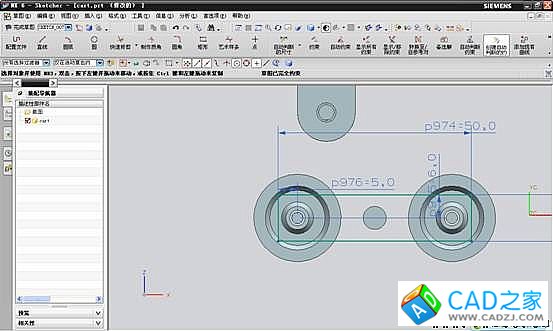
第五步、通过拉伸(对称值,12)建立从动轮的连接轴,见下图。

第六步、通过拉伸(拉伸距离2)建立从动轮的侧翼护板,见下图。
第七步、对从动轮的侧翼护板进行镜像及边倒圆(半径6)处理,见下图。

第八步、通过草图及管道(外径6)建立从动轮的连接轴,见下图。
第九步、通过拉伸(厚度2)建立连接轴端特征,见下图。