副标题#e# 引言
行星齿轮传动以其结构紧凑,承载能力强和较低的轴承载荷广泛应用于航空、船舶、汽车、冶金等各个领域。特别是由于特殊的工作环境,行星齿轮传动仍然占据当今世界直升机主减速器系统中的主流地位。目前,以数字化装配和计算机仿真分析为主要内容的虚拟样机技术在机械设计与制造中得到了广泛应用,但由于行星齿轮结构相对复杂、行星齿轮同时具有内啮合和外啮合,需要相当精准的造型和装配技术,因此构建行星齿轮机构虚拟样机显得相对困难。基于此,本文利用SolidWorks软件强大的建模功能和二次开发能力,以某型直升机主减速器内两级行星齿轮传动机构为例,构建了行星齿轮机构模型,结合SolidWorks内嵌的COSMOSMotion软件完成了其运动仿真。
1齿轮模型的生成
1.1 SolidWorks二次开发简介
SolidWorks是基于Windows平台的三维机械设计软件,它的设计数据可以全部在外部通过API接口修改。SolidWorks提供的API接口有OLE技术和COM组件两种形式,为用户提供了强大的二次开发功能。具有OLE编程和COM接口编程的开发工具,如Visual C++.Visual Basic,Delphi等均可用于SolidWorl国的二次开发,创建出用户定制的、专用的SolidWorks功能模块。除此之外,SolidWorks还提供了内置的宏命令编程,使得SolidWorks的定制更加容易。本文利用VC++对SolidWorks进行二次开发实现齿轮的精确造型。
1.2齿轮造型的过程
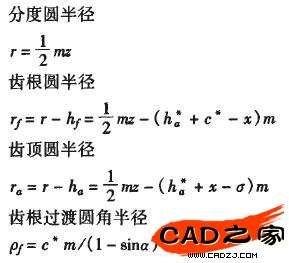
由于渐开线行星齿轮减速器靠齿轮的啮合来传递运动与动力,齿轮的参数化建模最为关键。齿轮齿廓由渐开线、过渡曲线、齿根圆、齿顶圆几部分组成,并不是连续的曲线,所以在绘制过程中也需要这几种曲线的组合。渐开线齿轮这几部分的几何尺寸都是由齿轮的模数m、齿数z、变位系数省决定的,是独立变量,因此应将m,z,x作为驱动尺寸。则渐开线齿轮零件形体尺寸即相关变量可用如下参数化模型表达。
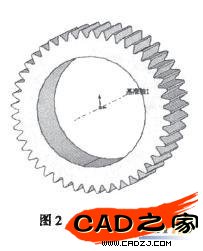
通过起点为Y轴上的象限点绘制渐开线,这时Y轴与齿轮渐开线的镜像中心夹角为θ,θ=θi+θn,θn=π/2z为l/2齿厚的夹角。将坐标旋转tana-a+π/2(1/2+4xtana/πz),,然后以Y轴为镜像中心(图1),进行镜像,这样轮齿的两条渐开线绘毕。将渐开线按其与齿顶圆、齿根圆的交点进行修剪并在齿顶圆与齿根圆上画出它们与渐开线的交点之间的两段圆弧,使其组成封闭曲线,再拉伸至相应宽度,这样,一个轮齿就绘制好了。圆形阵列上述特征,齿轮的三维参数化造型就完成了。依照上述过程,可以编制出齿轮绘制程序。画出的齿轮造型如图2。
行星齿轮传动以其结构紧凑,承载能力强和较低的轴承载荷广泛应用于航空、船舶、汽车、冶金等各个领域。特别是由于特殊的工作环境,行星齿轮传动仍然占据当今世界直升机主减速器系统中的主流地位。目前,以数字化装配和计算机仿真分析为主要内容的虚拟样机技术在机械设计与制造中得到了广泛应用,但由于行星齿轮结构相对复杂、行星齿轮同时具有内啮合和外啮合,需要相当精准的造型和装配技术,因此构建行星齿轮机构虚拟样机显得相对困难。基于此,本文利用SolidWorks软件强大的建模功能和二次开发能力,以某型直升机主减速器内两级行星齿轮传动机构为例,构建了行星齿轮机构模型,结合SolidWorks内嵌的COSMOSMotion软件完成了其运动仿真。

1齿轮模型的生成
1.1 SolidWorks二次开发简介
SolidWorks是基于Windows平台的三维机械设计软件,它的设计数据可以全部在外部通过API接口修改。SolidWorks提供的API接口有OLE技术和COM组件两种形式,为用户提供了强大的二次开发功能。具有OLE编程和COM接口编程的开发工具,如Visual C++.Visual Basic,Delphi等均可用于SolidWorl国的二次开发,创建出用户定制的、专用的SolidWorks功能模块。除此之外,SolidWorks还提供了内置的宏命令编程,使得SolidWorks的定制更加容易。本文利用VC++对SolidWorks进行二次开发实现齿轮的精确造型。
1.2齿轮造型的过程
由于渐开线行星齿轮减速器靠齿轮的啮合来传递运动与动力,齿轮的参数化建模最为关键。齿轮齿廓由渐开线、过渡曲线、齿根圆、齿顶圆几部分组成,并不是连续的曲线,所以在绘制过程中也需要这几种曲线的组合。渐开线齿轮这几部分的几何尺寸都是由齿轮的模数m、齿数z、变位系数省决定的,是独立变量,因此应将m,z,x作为驱动尺寸。则渐开线齿轮零件形体尺寸即相关变量可用如下参数化模型表达。
通过起点为Y轴上的象限点绘制渐开线,这时Y轴与齿轮渐开线的镜像中心夹角为θ,θ=θi+θn,θn=π/2z为l/2齿厚的夹角。将坐标旋转tana-a+π/2(1/2+4xtana/πz),,然后以Y轴为镜像中心(图1),进行镜像,这样轮齿的两条渐开线绘毕。将渐开线按其与齿顶圆、齿根圆的交点进行修剪并在齿顶圆与齿根圆上画出它们与渐开线的交点之间的两段圆弧,使其组成封闭曲线,再拉伸至相应宽度,这样,一个轮齿就绘制好了。圆形阵列上述特征,齿轮的三维参数化造型就完成了。依照上述过程,可以编制出齿轮绘制程序。画出的齿轮造型如图2。
2行星齿轮机构的虚拟装配
2.1装配条件
为使各个行星齿轮g都够均布地装入太阳轮口和内齿圈b之间,在设计行星齿轮除保证实现给定的传动比外,还应保证满足下列装配条件。
2.1.1邻接条件在行星齿轮传动中,为了使各行星轮不产生碰撞,必须保证行星轮之间有一定的间隙,两相邻行星轮的顶圆半径k之和大于其中心矩名,即2rag<lg。
2.1.2同心条件同心条件只适用于具有圆柱齿
轮的行星传动机构。在行星齿轮传动中,由于其中心轮轴线与主轴线重合,故各行星轮与中心轮相啮合的中心距就相等。因此可得同心条件为aag=agb,aag、agb为齿轮副的啮合角。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF