1. 3结构分解及型转化单元的分析模型
识别出结构分解所需要的信息后,结构分解路线的优选原则将机构分解为机架、主动件和有序单元组(虚拟单构件、双杆组、约束单构件).型转化单元共有37种,其数学模型可以归纳为26种.因此,构造一个单元基类CUnit来定义型转化单元运动分析的共同属性和方法,再从单元基类中派生出各种单元类对象.通过基类中虚函数的定义,引人多态机制,便于程序扩充.
1.3运动分析与仿真的实现
机构分解完成后,通过调用主动件及各型转化单元的运动分析子程序,从而实现对整个机构的运动分析.首先调用Component:: GetXform来得到该构件的初始位置的位姿矩阵,当主动件位置发生变化的时候,顺序调用各型转化单元的运动分析子程序,得到该位置的分析结果,然后调用Component::SetXform重新设置构件的位姿矩阵,这样的话,运动分析的结果就直接为仿真服务,从而实现动态仿真
2算例
以下面六杆机构为例说明机构的分解和分析仿真(机构三维实体模型和机构简图分别见图5和图6).

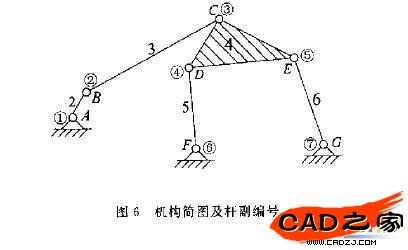
选取的计算参数:主动件AB转动步长为10°
杆组分解结果:型转化数为1;虚拟单构件为BC杆,约束单构件为EG杆,其余两杆为双杆组.
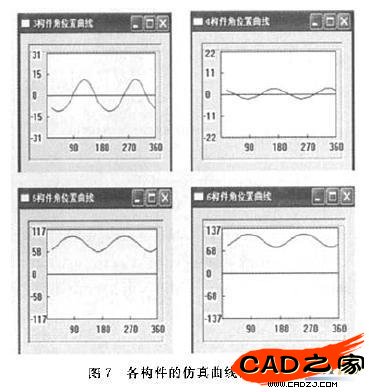
经程序计算,得到各杆的仿真曲线如图7所示
3结论
文中研究了在SolidWorks平台上开发面向对象的连杆机构参数化实体运动仿真系统的方法.结合国内先进的机构分析理论和SolidWorks强大的造型功能及其提供的API对象,开发出了一套三维实体化的通用连杆机构运动分析和仿真系统.
所开发的系统的特点.
1)完全基于三维实体的分析.运动分析中产生的大量数据以动态模拟、曲线图、数据表等形式表现出来,增强了连杆机构设计的直观性,并为连杆机构设计提供了全面准确的参考数据.
2)由于参数化构件模板库的建立,大大简化了机构实体建模的过程;而装配特征隐含了运动副的信息.省略了交互定义运动副的过程.
3)采用型转化及广义型转化的理论,将机构运动分析方程的维数降至最低,提高了求解的速度;模型构造与求解算法稳定可靠,不会出现系统崩溃现象.
4)具有良好的用户界面和适时的交互能力,程序的自动识别能力强,用户交互信息少,操作方便,对用户的专业要求很低
5)程序的通用性好,不受机构复杂性和自由度的限制.