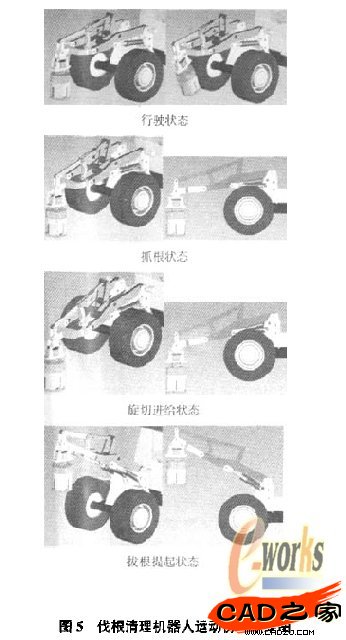
①行驶状态:l、m为0(为减小机器人碰撞的几率,必要时可将机器人靠向车体方向收回一定角度,以增加机器人的离地间隙)。
②抓根状态:l减小、m增大,动臂下降,机械手腕液压臂仲长调整机器人中轴线与伐根中轴线的角度,至机器人将伐根七部罩住,两轴线重合为止。
③旋切进给状态:此时机器人旋切筒转动,旋切刀开始切割伐根的侧根,l进一步减小降低机器人的高度,m也进一步增大保持两轴的重合,至侧根全部被切断为止。
④拔根提起状态:夹紧液压缸启动后,四个机械抓夹紧伐根,此时l开始逐渐增大,动臂提升机器人将伐根拔出,m将根据实际情况适时调整。因为此时伐根大部分已在旋切筒内,所以依靠行走地盘将m值侧重于保持机器人的稳定,最后依靠行走底盘将伐根送到指定地点归堆或装车。整个仿真运动的实时效果见图5。
3伐根清理机器人各工作状态极限位置的参数测量
利用SolidWorks2007提供的测量工具,可以准确地测量设计需要的参数,通过这些参数与实际工作要求的参数进行比较,并根据比较结果实时地修改设计参数以满足实际工作需要。
行驶状态,机器人可根据路况适当调整高度和角度,避免因碰撞障碍物而损坏机器人。在抓根和旋切进给状态,按照机器人的工作要求,以大兴安岭地区的落叶松、桦树等伐根形状和根系分布的数据为依据(大兴安岭地区的落叶松、桦树等伐根形状为三角形和五角形,根系分布为片状,没有中央主根),主侧根即为主根,人土20-30cm后则向伐根周围分布(因再往下就是岩石),伐根径级在25-5Ocm时主侧根径级平均为10-20cm,长度平均为200-300cm。根据采伐规程要求,伐根高度应离地6cm。鉴于此,该样机的旋切筒能切人土层的最大深度达到40cm即可。但在实际上,可根据不同需要加大旋切筒的入土深度和改变旋切筒的直径来满足对不同径级伐根的作业要求,同时也能促进机器人的系列化和通用化。通过对整体模?}")在这两个状态下机器人相应参数的测量表明,整套装置完全满足设针要求(以地表为水平,机器人在动臂的控制下最大降很高度为5O0mm,最大提升高度为2000mm )。且通过鼠标拖动可知,在液压缸工作允许范围内,适当修改液压缸伸缩行程或更换不同型号液压缸即可满足对不同地区、不同树种伐根清理的要求。利用C05MOSMotion2006仿真运动时的"碰撞干涉检查"功能提供的碰撞千涉部位,通过对机械手臂和接日的测量,分析其产生碰撞干涉的原因,实时修改设计参数,然后重做运动仿真,直至没有碰撞于涉为止,由此既可达到优化设计的目的,SolidWorks2007也将自动更新其零件库和装配模型。
4结束语
综上所述,在充分利用SolidWorks2007强大的参数化特征建模功能和兰维动态装配技术,结合COSMdSMution2000运动力学仿真功能,实现了伐根清理机器人在采用新的行走底盘后整套工作装置参数化特征建模和三维动态运动仿真。从整个虚拟设计和运动仿真的过程中可以看出,通过在计算机软件平台下对整套装置的设计和仿真分析,能够及时地发现设计中的缺陷,并根据分析结果进行实时改进,为以后利用更加专业的力学分析软件进一步分析机构的工作原理和性能、再次优化改进作好准备,也为进行物理样机的试制提供了试验依据,可显著地缩短研发周期,降低设计成本.一次建模分析加上数据材料的收集总共用时不到两周,其工作效率提高非常明显。实践证明,本次建模与运动仿真分析具有实际的指导意义,有助于伐根清理机器人的进一步改制推广。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF