副标题#e# 1引言
机械工程中的虚拟样机技术又称为机械系统动态仿真技术,是国际上20世纪80年代随着计算机技术的发展而迅速发展起来的一项计算机辅助工程技术,其核心是利用计算机辅助分析技术进行机械系统的运动学和动力学分析。它是一种基于产品的计算机仿真模型的数字化设计方法,这些数字模型即虚拟样机的建造及仿真,可以大大简化机械产品的设计开发过程,大幅度缩短开发周期。
并联机器人机构是近二十多年来发展起来的一种机器人种类。它与串联机器人(即工业机器人)相比,具有刚度大、结构稳定、承载能力大、精度高、速度和加速度高、位置反解容易等诸多特点,与串联机器人形成互补,应用领域前景广阔。目前,国内外研究并联机器人机构多集中在3自由度(三平移)和六自由度并联机器人机构,而3自由度(至少具有一个转动),4和5自由度的并联机构的研究比较少。主要原因是受并联机构的各分支链相同和对称的影响。但是研究表明在先进制造装备的研发领域看好3、4和5自由度的并联机器人机构,如以机器人工作台为应用背景的具有3,4,5自由度的并联机构。
本文就一种新型四自由度并联机器人机构的理论分析后,运用虚拟样机技术,在SolidWorks软件平台上构建该并联机器人机构模型,得到其运动特性曲线,为进行工程分析、设计优化和最终的实际样机的试制奠定了基础,为其他结构形式的并联机构虚拟样机的设计提供参考。
2四自由度并联机器人机构
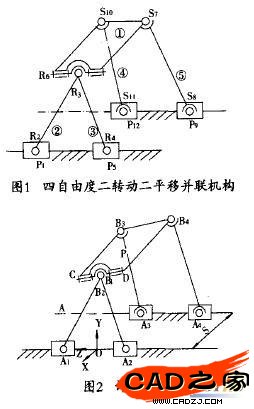
平行滑块式四自由度并联机构,其中的两条腿由固定长度的杆一端通过球铰(s)与滑块连接,另一端通过球铰(s)与动平台连接;另外两条腿由固定长度的杆一端通过转动副(R)与滑块连接,另一端通过两个互相垂直的转动副(R)与动平台连接。滑块由滚珠丝杠副驱动,组成平行移动副,4个移动副分布在一个平面内。平行滑块式四自由度并联机构见图1,图2为计算模型图。四自由度并联机构的结构参数有动平台的球铰分布参数CD= m ,BC=n,平行导轨间的距离S,杆长Li(i=1,2,3,4),导轨的长度L。四自由度并联机构包括杆、定平台和动平台平台共10个杆件,连接这10个杆件的有12个运动副。该种并联结构的结构设计及驱动控制等均可按常规机电技术进行设计和安装。如在动平台上安装动刀头和刀具,即可以作为并联结构的虚拟轴数控机床;如在动平台上安装测头即可以作为并联坐标测量机的执行机构。
机械工程中的虚拟样机技术又称为机械系统动态仿真技术,是国际上20世纪80年代随着计算机技术的发展而迅速发展起来的一项计算机辅助工程技术,其核心是利用计算机辅助分析技术进行机械系统的运动学和动力学分析。它是一种基于产品的计算机仿真模型的数字化设计方法,这些数字模型即虚拟样机的建造及仿真,可以大大简化机械产品的设计开发过程,大幅度缩短开发周期。
并联机器人机构是近二十多年来发展起来的一种机器人种类。它与串联机器人(即工业机器人)相比,具有刚度大、结构稳定、承载能力大、精度高、速度和加速度高、位置反解容易等诸多特点,与串联机器人形成互补,应用领域前景广阔。目前,国内外研究并联机器人机构多集中在3自由度(三平移)和六自由度并联机器人机构,而3自由度(至少具有一个转动),4和5自由度的并联机构的研究比较少。主要原因是受并联机构的各分支链相同和对称的影响。但是研究表明在先进制造装备的研发领域看好3、4和5自由度的并联机器人机构,如以机器人工作台为应用背景的具有3,4,5自由度的并联机构。
本文就一种新型四自由度并联机器人机构的理论分析后,运用虚拟样机技术,在SolidWorks软件平台上构建该并联机器人机构模型,得到其运动特性曲线,为进行工程分析、设计优化和最终的实际样机的试制奠定了基础,为其他结构形式的并联机构虚拟样机的设计提供参考。
2四自由度并联机器人机构
平行滑块式四自由度并联机构,其中的两条腿由固定长度的杆一端通过球铰(s)与滑块连接,另一端通过球铰(s)与动平台连接;另外两条腿由固定长度的杆一端通过转动副(R)与滑块连接,另一端通过两个互相垂直的转动副(R)与动平台连接。滑块由滚珠丝杠副驱动,组成平行移动副,4个移动副分布在一个平面内。平行滑块式四自由度并联机构见图1,图2为计算模型图。四自由度并联机构的结构参数有动平台的球铰分布参数CD= m ,BC=n,平行导轨间的距离S,杆长Li(i=1,2,3,4),导轨的长度L。四自由度并联机构包括杆、定平台和动平台平台共10个杆件,连接这10个杆件的有12个运动副。该种并联结构的结构设计及驱动控制等均可按常规机电技术进行设计和安装。如在动平台上安装动刀头和刀具,即可以作为并联结构的虚拟轴数控机床;如在动平台上安装测头即可以作为并联坐标测量机的执行机构。
3并联机构的参数化实体建模
3.1 SolidWorks设计环境
建立并联机构的实体模型是对其进行仿真和分析的前提,当完成总体设计、概念设计和尺度综合后,可在三维机械CAD软件SolidWorks平台下按照机构的实际尺寸进行样机实体建模。整个建模过程采用自下而上和并行工程的建模策略,分两个层面完成。第一层面按照零件的实际设计尺寸对零件个休造型,第二个层面根据Teamwork的思想,利用三维CAD软件的自动管理文档功能实时监控样机的设计过程,并模拟机构实际装配过程进行机构零部件的装配,还可利用三维CAD软件的渲染功能对3D模型进行色彩、材质、纹理、光照处理,以增强虚拟样机的真实感。
同时SolidWorks软件具有以下几个功能:
1)全参数化特征实体建模,以便于进行设计中的结构设计修改;
2)运动部件之间的干涉检查;
3)可靠的工程分析数据转换,可以在设计环境中与工程分析软件链接,结构尺寸参数等的设计更改可以直接与工程分析关联,使设计和分析做到平行一致;
4)3D模型与2D工程图全相关,确保虚拟样机设计中数据的一致性。
SolidWorks所以5olidWorks软件具有满足并联机构虚拟样机参数化设计的要求。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF