1 引言
步进电动机是一种将离散的电脉冲信号转化为相应角位移或线位移的电磁机械装置,它输出的角位移与输入的脉冲数成正比,是一种输入与输出脉冲对应的增量驱动元件。它具有转矩大、惯性小、响应频率高等优点,已经在工业上得到广泛的应用。但其步矩角较大,一般为1.5"3°,往往满足不了某些高精度定位、精密加工等方面的要求。
实现细分驱动是减小步矩角、提高步进分辨率、增加电动机运行平稳的一种行之有效的方法。目前步进电动机细分驱动控制,多采用量化的梯形波、正弦波作为细分驱动的电流波形,但实际上这些电流波形一般在步进电动机上均不能得到满意的细分精度。
在合理选择电流波形的基础上,提出用AT89C52单片机控制实现的步进电动机斩波恒流细分驱动方案,其运行功率小,可靠性高,通用性好,细分精度高,具有很强的实用性。
2 细分电流波形的选择及量化
步进电动机的细分控制,从本质上讲是通过对步进电机的励磁绕组中的电流控制,使步进电动机内部的合成磁场为均匀的圆形旋转磁场,从而实现步进电动机步矩角的细分。一般情况下,合成磁场矢量的幅值决定了步进电动机旋转力矩的大小,相邻两个合成磁场矢量之间的夹角大小决定了步矩角的大小。因此,想要实现对步进电机的恒力矩均匀细分控制,必须合理控制步进电机绕组中的电流,使电动机内部合成磁场的幅值恒定,而且每个进给脉冲所引起的合成磁场的角度变化也要均匀。我们知道在空间彼此相差2π/m的m 相绕组,分别通以相位上差2π/m而幅值相同的正弦电流,则合成的电流矢量便在空间做旋转运动,且幅值保持不便。这一点对于反映式步进电动机来说比较困难,因为反应式步进电动机来说比较困难,因为反映式步进电动机的旋转磁场只与绕组电流的绝对值有关,而与电流的正反流向无关。以比较经济合理的方式对步进电机实现步矩角的任意细分,绕组电流波形宣采用如图1所示的形式
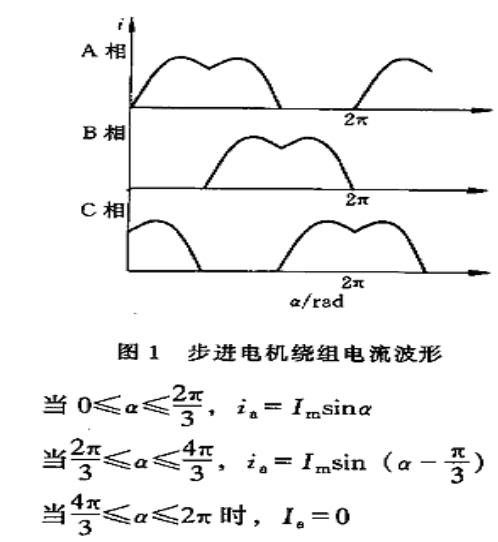
其中,α为电动机转子偏离参考点的角度。 ib滞后于ia 2π/3, ic超前于ia 2π/3。此时,合成电流矢量在所有区间, 从而保证合成磁场幅值的恒定,实现电动机的恒转矩,而步进电动机在这种情况下也最平稳。将绕组电流根据细分倍数均匀量化后,所得细分步矩角也是均匀的。为了进一步得到更加均匀的细分步矩角,可以通过实验测取一组在通入量化电流波形时,步进电动机细分步矩的数据,然后对其误差进行插值补偿,求得实际的补偿电流曲线,这些工作大部分可以由计算机来完成。在取得矫正后的量化电流波形之后,以相应的数字量储存于E?PROM 中的不同区域,量化的程度决定了细分驱动的分辨率。
从而保证合成磁场幅值的恒定,实现电动机的恒转矩,而步进电动机在这种情况下也最平稳。将绕组电流根据细分倍数均匀量化后,所得细分步矩角也是均匀的。为了进一步得到更加均匀的细分步矩角,可以通过实验测取一组在通入量化电流波形时,步进电动机细分步矩的数据,然后对其误差进行插值补偿,求得实际的补偿电流曲线,这些工作大部分可以由计算机来完成。在取得矫正后的量化电流波形之后,以相应的数字量储存于E?PROM 中的不同区域,量化的程度决定了细分驱动的分辨率。
3 细分驱动方案及硬件实现
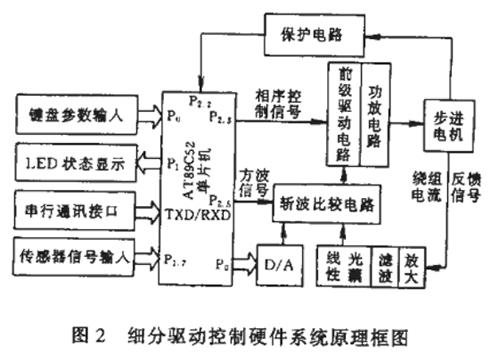
斩波恒流细分驱动的方案的原理为:由单片机输出 E?PROM 中储存的细分电流控制信号,经D/A转换为模拟电压信号,再取样信号进行比较,形成斩波控制信号,控制各功率管前级驱动电路的导通和关断,实现绕组中电流的闭环控制,从而实现步矩的精确细分。系统原理框图如图2所示。
3.1 控制电路
控制电路主要由AT89CT52单片机、驱动电路、D/A转换、E?PROM及可编程键盘/显示控制器Intel8279等组成,单片机是控制系统的核心。受控步进电动机的细分倍数、运行脉冲、正反转、运行速度、单次运行线位移、启/停等的控制即可由键盘输入,也可通过与上位机的串行通信接口由上位机设置。状态显示提供当前通电电动机、机电流大小、电动机运行时间、正反转、当前运行速度、线位移及相关计数等的显示,并将工作状态和数据传送给上位机。
传感器(霍尔传感器)由于检测计数器的当前值。单片机的主要功能是输出E?PROM中储存的细分电流控制信号进行D/A转换。根据转换精度的要求,D/A转换器即可以选择8位的,也可以选择12位的。本驱动的控制器选用的是8位的D/A转换器MAX516。MAX516把4个D/A转换器与4个比较器组合在单个的CMOS IC(DIP20封装)上4个D/A转换器共享一个参考输入电压UREF均可采用下式表示#p#分页标题#e#
UDACi=UREFN/256
式中 N=0,1,…,255
N对应于8位的DAC输入码D0~D7(此处为细分电流控制信号)。通过、调节UREF的变化范围,便可调节步进电动机绕组中电流的幅值。
3.2 功率驱动电路
工作中,步进电机组分电流控制信号的D/A转换值Ui输入到MAX516内部各比较器COMPi的同向输入端。绕组电流取样信号Ui输入到COMPi的反向输入端。斩波恒流驱动采用固定频率的方波与比较器输出信号调制成斩波控制信号,控制绕组的通电时间,使反馈电压Ui始终跟随D/A转换输出的控制电压Ui。合理选择续流回路就可使绕组中的电流值在一定的平均值上下波动,且波动范围不大。
调制用方波信号频率为21.7KHz,由AT89C52的P2.5/PWM端产生,且各相是同频斩波,不会产生差拍现象,所以消除了电磁噪声。为防止因比较器漂移或干扰导致的功率开关误导通,把斩波控制信号与像序控制信号相“与”后去控制功放管。当开关截止时,并联RC、恢复复续流二级管VD、绕组L及主电源构成泄放回路。与单纯电阻释能电阻相比,RC释能电路使功耗和电流纹波增加较小,而电流下降速度大大加快。电流取样信号由精密电流传感放大器MAX471完成。当绕组电流流过其内部35mΩj精密取样电阻时,经内部电路变化,转换为输出电压信号
VOUT=ROUT×(ILAOD×500μA/A)
其中ROUT为MAX471外部调压电阻,阻值按设计要求选定;ILAOD为流过精密电阻的相绕组电流。MAX471同时具有电流检测与放大功能,从而大大方便了整个电路的设计与调试。
功率开关管(功放管)是功放电路中的关键元件,影响着整个系统的功耗和体积。由于所设计的驱动器主要用来驱动额定电流3A、额定电压27V以下的步近电动机,故选用高额VMOS功率场效应晶体管IRF594(UDS=100V,RDS(ON)=0.052Ω,ID=27A)作为开关管。IRF504导通电阻很小,因此,即使电动机长时间运转,该VMOS管壳本身的温度也比较低,无须外加风扇。为了提高步进电动机的工作可靠性,消除电动机电感性绕组的串扰,本系统无论从驱动部分还是反馈部分都进行了隔离。驱动隔离采用了高速光电耦合器6N137为隔离元件,一方面可以实现前级控制电路同步进电动机绕组的隔离:另一方面使功率开关管的驱动变的方便可靠。反馈通道的滤波部分采用无源低通滤波器,其作用是高速衰减绕组(电感线圈)在开关时截止频率以上的瞬时高频电压信号,从而避免控制电路做出太迅速的反应可以有效的的防止步进电动机的振荡。线性光偶合电路的作用是将滤波后的采样电阻反馈信号线性的传输给比较器。

4 软件设计
步进电动机细分驱动控制的软件主要由主控程序、细分驱动程序、键处理程序、显示驱动程序、监控程序等部分组成。细分驱动主控制程序控制整个程序的流程,主要完成驱动的初始化、中断方式的设置、计数器工作方式的设计及相关子程序的调用等。初始化包括8279各寄存器、8279的显示RAM、AT89C52的中断系统及内部RAM等。在AT89C52的各中断中,使用了INT1、T0、和T1这3个中断,其中,INT1为高优先级,在运行状态下当有停止键按下时,则INT1中断服务程序将T0关闭,从而使步进电动机停止,T0控制每一步的步进周期,该服务程序基本上只作重置定时期和置标志位的操作,而其他操作均在主程序中完成。其流程图如图3所示。细分驱动程序中,细分电流控制信号的输出采用单片机片内E?PROM软件查表法,用地址选择来实现不同通电方式下的可变步距细分,从而实时控制步进电动机的转角位置,其流程图如图4所示。
 #p#分页标题#e#
#p#分页标题#e#
5 结束语
本设计实现的步进电动机恒力矩细分驱动控制器,最高细分达到256细分,能够适应大多数中小微型步进电动机的可变细分控制较高细分步距角精度及平滑运行等要求。
该驱动控制器已用于我们的校内科研基金项目“全自动高精度线圈切割机”的驱动控制系统中。该切割机的拖动执行元件为三相6拍步进电动机,其粗步距角为1.5°,轴齿轮直径为32mm,故步进电动机送料的粗步进位移为: πd×1.5/360=419μm。为进一步提高切割机定位精度和系统的运行平稳性,采用上述细分驱动控制,细分级数为16时,切割定位精度为26.2μm。从运行实际的情况看,该步进电动机驱动器实现了较高的稳速精度和切割精度惯性小,运行可靠,取得了满意的效果。
相关文章
- 2020-12-293D打印建模、打印、上色实现与技巧:AutoCAD篇PDF下载
- 2014-08-18某工厂厂房拓展区控制性详细规划图
- 2014-08-05疾病控制中心建筑施工图下载
- 2013-11-28中式比较复杂样式门图纸大全
- 2013-08-29比较稀有的艺术砂岩浮雕,园林花盆,园林喷泉,背景墙CAD图
- 2013-07-24酒店房间详细立面、平面图(有详细的强弱电图带床头柜面
- 2013-06-13双速消防兼平时两用风机电路图下载
- 2013-06-12喷淋泵一备一用控制原理图
- 2013-05-17发动机连杆的总成图、连杆体和连杆盖的零件图
- 2013-04-13CAD常用电气控制原理图通用图免费下载