随着重型机器的发展,常常需要对大型整体零件和几何形状复杂的工件进行加工。传统的龙门镗铣床龙门柱固定,载有工件的工作台沿导轨纵向进给。由于机床运动部件重量大,难以获得高的加速度;同时因受工作台长度的限制以及节省工作场所占地面积的要求,龙门柱固定式结构镗铣床对于大型工件的高速加工已远远不能满足要求。而高速龙门移动式镗铣床,在满足动、静态刚度的情况下,让工作台与工件保持静止,使龙门柱沿导轨纵向进给,因为立柱的运动质量相对较小,所以可以获得高的加速度特性。然而,由于横梁及其相匹配的刀架,龙门及其相匹配的部件等所组成的大型移动部件,并不总是形成对称结构与对称受力,以及运行中的各种不确定性扰动,尽管龙门柱两边采用完全相同的传动机构,但最终还是不能保证龙门框架两边立柱移动的一致性,这种不一致性产生的机械耦合可能使龙门框架驱动部件和被加工工件受到损坏。所以,两边立柱的同步传动是这类机床消除机械耦合,避免机械损坏,保证加工精度的关键技术。
为了解决刀架在横梁位置变化所引起的立柱两边等效惯量的变化破坏输出的动态同步性能,采用负载动态补偿方法调整比例增益,使两电机保持同步。近年来,智能控制发展十分迅速,特别是模糊控制不完全依赖对象的数学模型,适于对具有不确定性的系统和非线性系统进行控制,有利于解决许多经典控制难以解决的问题。本文引入模糊PID控制器作为速度调节器,有效的利用了模糊控制的优点,从而提高了同步控制精度。
龙门移动式镗铣床的结构及耦合
图1是双直线电机驱动的龙门移动式镗铣床结构示意图。两台直线电机分别驱动两个立柱,一个控制回路的输入通过机械耦合作用影响另一个控制回路的输出,任一单回路的干扰,不仅影响本回路的输出,也会通过横梁影响另一回路的输出,即干扰互相耦合,两台驱动电机输出端存在机械耦合。
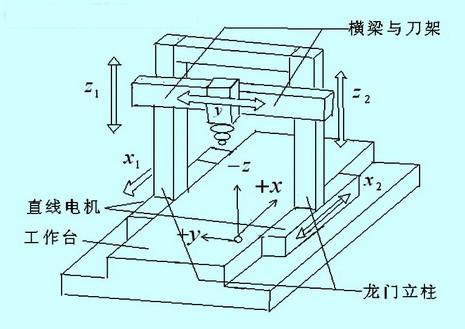
图1直线电机驱动的龙门移动式镗铣床结构
直线永磁伺服电机(LPMSM)数学模型
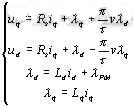
LPMSM的d-q轴模型电压方程及磁链方程为:
 (1)
(1)
式中,Rs为动子电阻;ud,uq,id,iq,Ld,Lq,λd,λq分别为d、q轴动子电压、电流、电感和磁链;τ为动子速度;λp/d为极距;为定子永磁体励磁磁链。
对LPMSM进行矢量控制,使动子电流矢量与定子永磁体磁场在空间正交,即使id=0,则:
 (2)
(2)
其中,kT为推力系数
运动方程
 (3)
(3)
其中FL为负载阻力;FE为端部效应产生的等效阻力;D为粘滞摩擦系数;m为动子及其所带负载的质量。
系统的控制结构
在龙门移动式镗铣床的同步伺服系统中,两个伺服子系统按同一速度给定信号运动,定义其中一个伺服系统为主动轴,另一个为从动轴,就构成了独立的主—从驱动方式。通过对直线电机进行推力控制,使两轴保持同步。本文采用主从控制结构,仅对主动电机使用位置控制。主动电机的位置控制器输出当作从动电机的速度命令信号,当主动电机受到外界干扰产生位置反馈的变化,从动电机的参考速度与主动电机的参考速度一样也随之变化,这样将提高控制系统耦合结构的安全系数。同步控制系统结构原理图如图2所示。其中,P2为位置前馈控制器;P1为位置比例控制器;模糊PID控制器为速度控制器,以实现对输入信号的快速精确响应;PI控制器对动态变形力补偿,防止高速运行下,过大的双轴同步误差对系统造成危害。#p#分页标题#e#
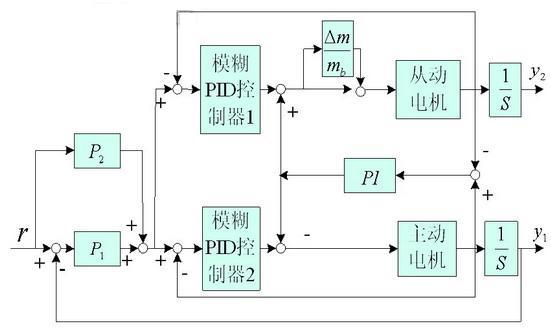
图2 同步控制系统结构原理图
负载动态补偿设计
当龙门移动式镗铣加工中心实现二维运动控制时,Y轴直线电机驱动的刀架位置变化往往会导致X轴直线电机等效惯量的改变,其中,从动电机由于不具有独立的定位控制,容易受到等效惯量的改变而影响输出,进而影响两个X轴的输出同步。这就要求采用负载动态补偿的方法,调整比例增益并给X轴从动电机以控制补偿,使得系统能够保持同步运行。当电机等效惯量增加的时候,它的电流输入与速度输出之间的传递函数将会产生变化,即l/△mb->l/(mb+△m)。负载动态补偿的原理正是利用一个权重调整电流输入与速度输出间的传递函数,使其保持W/mb=W'/(mb+△m)的恒定关系,则W'=(1+△m/mb)*W。即为负载动态调变增益。其中W只是一个比例值,可定义为1。设计W`只需要求得△m即可。如图3所示,定义长度e、f、g、h、及诸质量重心m1、m2、m3和A、B两点。利用力矩平衡原理可以计算出B点承受结构(含m1、m2)等效质量△m的大小。
通过负载动态调变增益的补偿,即使从动电机等效惯量产生变化,其速度输出影响也不会因此受到影响,使系统仍维持良好的同步响应。
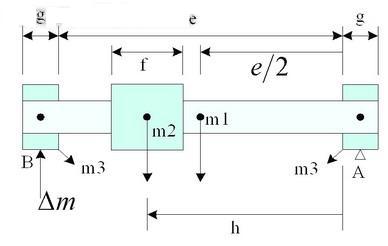
图3力矩平衡示意图
模糊PID控制器的设计
根据模糊控制理论设计模糊控制器。定义系统误差|e|和误差的变化率|ec|作为模糊控制器的输入量,其中
e=yd-y (4)
ec=△e (5)
Kp,Ki,Kd为输出,即此模糊控制器为两输入三输出形式。输入语言变量 和 的论域均为{-6, -5, -4, -3, -2, -l, 0, l, 2, 3, 4, 5, 6},输出语言变量Kp,Ki,Kd的论域均为{ 0, l, 2, 3, 4, 5, 6}。通过总结以往工程实际操作经验得到e、ec的隶属度函数和PID参数Kp,Ki,Kd的控制规则表。并设计出模糊PID控制器。Kp,Ki,Kd的控制规则如表1-3所示:

系统的仿真
采用两台参数完全相同的直线电机进行仿真研究,参数如下:
M=11.0kg
D=2.0N.s/m
KT=27.5N/A
Fe=200N
控制器参数:P1=12、P2=1、PI=0.0583+0.213/S。当时间为0.5s时,在X轴输入幅值为0.4m的阶跃信号为位置信号。针对Y轴负载重心的变化,本研究以负载动态补偿消除从动电机因为等效惯量的变化而造成的影响,并加上模糊PID控制器进行调节。图4为无负载动态补偿和模糊PID控制时系统的位置误差响应曲线,图5为加入负载动态补偿和模糊PID控制之后的位置误差响应曲线,可以看出模糊PID控制和负载动态补偿的加入大大提高了两直线电机的同步精度。
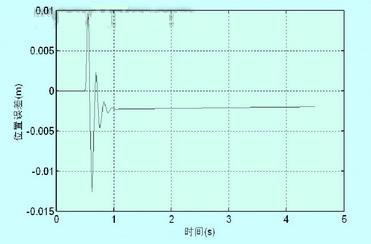
图4无负载动态补偿和模糊PID控制的位置误差响应曲线
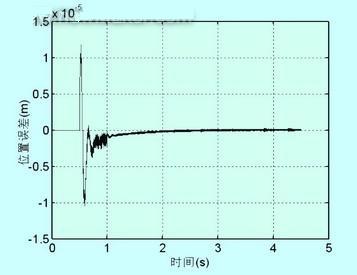
图5有负载动态补偿和模糊PID控制后位置误差响应曲线
结语
本文在分析龙门移动式镗铣床中双直线电机驱动的X轴上两直线电机间不同步的主要原因的基础上,提出了模糊PID和负载动态补偿的控制方法。由仿真曲线可以看到,模糊PID控制和负载动态补偿的加入大大提高了两直线电机的同步精度。#p#分页标题#e#
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF