本文介绍了十四条SolidWorks机器人设计的系统建模技巧。
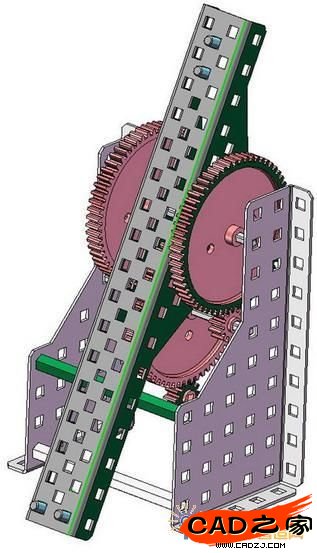
使用 VEXplorer 系统等机器人设计套件无疑有助于构造和装配机器人。然而,如果只凭人力来构思,即使只是构想比较简单的机器人系统,也是一件冗长乏味、绞尽脑汁的事情。就算对于最具想象力的工程师来说,在头脑中构思细节、方位、外壳和间距,也是具有很大的挑战。所以,必须使用 2D 工程图和 3D CAD 模型来直观地表示机器人设计。
不管是学生、爱好者还是以竞赛为目的的机器人团队,都可使用 VEXplorer 系统来构思并建立各种各样的机器人应用,这只受物理规则和想象力的限制。所以,理解 3D 建模的基本概念对于有效地开发机器人系统非常重要。3D CAD 为机器人设计师插上了想象的翅膀,为其提供视觉线索和参考点,助其将想法转化为现实。
组织通过使用 CAD 建模技术,可以在机器人系统的设计、制造和竞争方面持续取得成功。VEXplorer 系统附带提供 SolidWorks® 的 150 天学生设计套件,此套件每天都帮助全球机器人工业的工程师构建成熟的产品。有关使用 SolidWorks 的 3D 建模技术进行 VEX 机器人开发的免费概述和详细的逐步说明可在 www.solidworks.com/VEX 找到。
3D 建模包括三种基本文档:
1. 零件图 – 各个设计部件的 3D 表示
2. 装配图 – 零件和/或其它装配体的 3D 排布
3. 工程图 – 2D 工程图,通常用来表示零件或装配体
这些文档都有助于机器人系统的总体设计。对于机器人设计人员来说,无论年龄和技能水平如何,只要理解了使用 Solidworks 进行 3D 实体建模的基本概念并掌握和运用后文中的 14 条技巧,都可为构建极富获奖竞争力的复杂、创新性机器人设计奠定基础。
技巧 1 – 利用 web 数据库中的模型。
不管是为了生产还是竞赛,对于机器人设计来说,时间都是一项重要因素。他山之石,可以攻玉,构建自己的机器人设计系统模型的最高效方法之一就是从在线设计数据库中获取 3D 模型。3DContentCentral (www.3dcontentcentral.com) 是一个基于 web 的设计数据库,它包含领先制造商提供的数以百万计的零部件,文件格式多种多样。您可以下载气动系统、马达、齿轮以及几乎您可想到的任何机械和电气零部件的精确 CAD 模型。文件格式包括 SolidWorks、IGES、Inventor®、Pro/ENGINEER®、STEP 和 DWG 等等。例如,您可根据所需的冲程、压强、力和各种选项来配置并下载 SMC 气缸模型。又如,您在 VEX 机器人竞赛中无需自行构建轮子模型,而可以从 3DContentCentral 获取模型文件。用户数据库区域以七种语言提供,并包括全球设计用户群提供的共享模型。


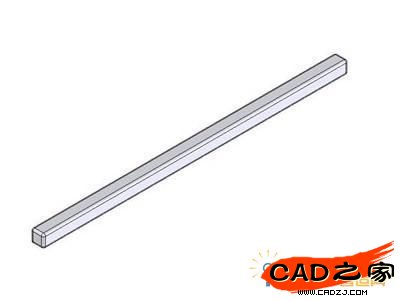
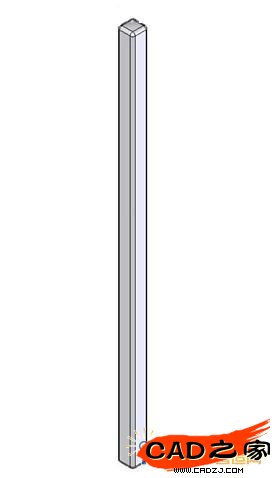
技巧 2 – 理解零件方位。
零件由特征构成,特征在草图中建立。为了理解零件在空间中的方位,您必须理解前基准面、上基准面和右基准面的位置。一旦选定了草图平面,即确定了零件方位。例如,图中的 VEX 轴在前基准面中由一个 2D 方形草图构成,如果选择右基准面或上基准面作为草图平面,则图形窗口中的零件方位均会不同。
前基准面

右基准面
上基准面
草图平面确定了方位。
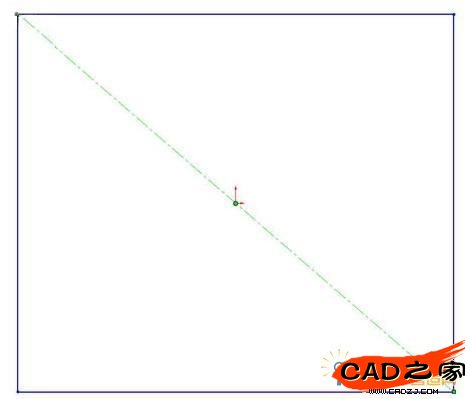
技巧 3 – 在草图中使用对称。
矩形草图工具用于创建 VEX 轴的轮廓。在机器人设计中,您会希望零件具有对称性。原点代表前基准面、上基准面和右基准面的交点。简单的矩形草图可从原点开始绘制,但是,如果您将原点置于草图中心,则草图将保持关于上基准面和右基准面对称。在矩形的两个顶点间连接一条辅助线,并在原点和该中心线间建立中点关系,将可确保矩形始终对称。

技巧 4 – 在标注尺寸前插入几何关系。
在 SolidWorks 软件中,草图实体和模型几何体之间的关系对于定义行为并在 2D 和 3D 草图中保持设计意图非常重要。几何关系(水平、竖直、平行、垂直、相等、同心、共线、等径、相切和固定)用于约束各个草图实体并与现有的面、边和参考几何体形成关系。矩形草图工具包含两项平行关系和两项垂直关系。中心线用于与原点形成中点关系。因为 VEX 轴是由方形铝锭制成的,所以通过相等关系来代表物理形状。如果要更改铝锭尺寸,则使用一个尺寸来控制方形草图的总体尺寸。小写符号用于表示关系,您可通过选择 View(视图)> Sketch Relations(草图关系)来显示这些符号。对于机加工零件,软件会将这些零件显示为黑色,您应该为这些零件彻底定义草图。将尺寸放在轮廓外可节省在 2D 工程图中放置尺寸的步骤。#p#分页标题#e#

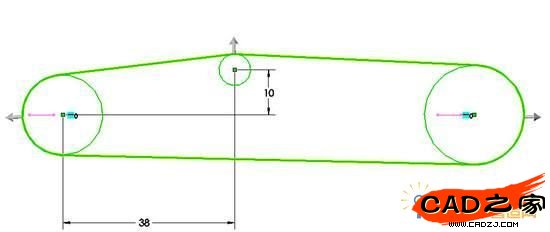
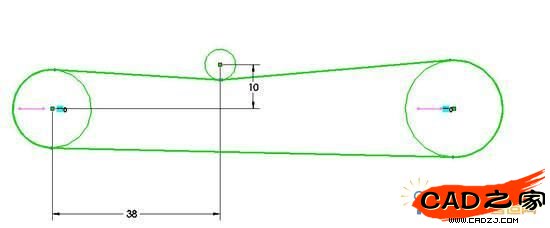
草图块可用于对草图实体进行智能组合,并有助于创建机器人机构的 2D 布局。高级草图关系可用于在 2D 草图中模拟齿轮、凸轮和皮带/链条的运动。
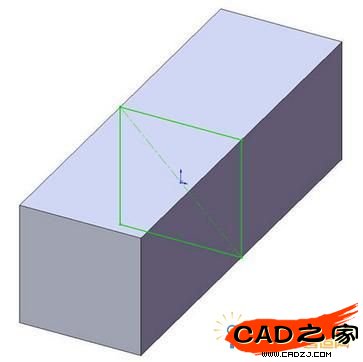
技巧 5 – 创建关于草图平面对称的特征。
创建对称特征可节省以后建立特征以及形成装配体的时间。例如,您可通过使用对称关系并指定距离来将齿轮灵活地定位在 VEX 轴的中部或端部。若要为设计中的这种未来行为作准备,最好使 VEX 轴关于草图平面对称。Extrude Boss/Base(拉伸凸台/基体)特征中的 Mid Plane(中面)选项用于将 2D 草图垂直于草图平面并在两侧伸出相等的距离。
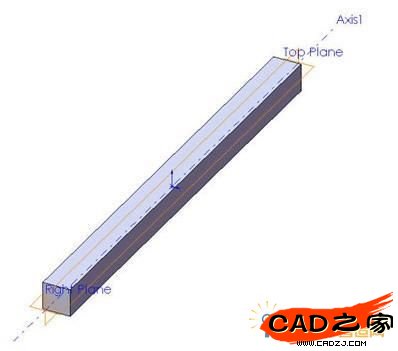
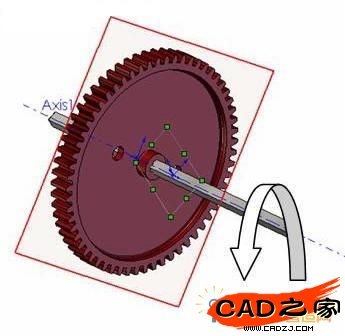
技巧 6 – 使用参考几何体和参考平面
参考几何体(例如平面、轴和坐标系)有助于创建特征和装配部件。方形 VEX 轴与圆柱形齿轮装配在一起,在 VEX 轴中心插入一个参考轴后,即可使方形部件与圆柱形部件同心配合。在齿轮中心插入一个参考平面,即可定位轮齿中心,从而在装配体中对齐多个齿轮。
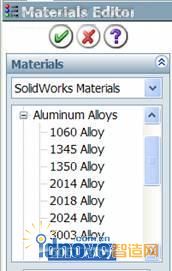
技巧 7 – 在零件中定义智能属性
除了用于确定零件整体尺寸和形状的几何体外,本软件中还有智能属性,例如材料、质量、零件号和颜色,您可将这些属性分配给 SolidWorks 文档。插入到零件中的属性会自动传递到装配图和工程图中。例如,为零件指定材料后,SolidWorks 会根据密度计算零件质量。在需要设计符合特定重量等级的机器人竞赛中,即可在 SolidWorks 中计算质量。如果您为机器人系统中的每个部件都指定了材料或质量,软件即可计算装配体的总质量。如果为每个部件都指定了零件号,则零件号的值会自动传递到工程图和物料清单 (BOM) 中。如果您为零件指定了材料,该材料就会在 FeatureManager 中列出。一旦选定材料,就会同时选定密度、弹性模量、屈服强度和热膨胀系数等物理属性。
技巧 8 – 可在设计早期使用内建的零件分析功能。
在机器人设计中,必须时刻注意超重、材料强度和安全性等问题。您可通过在 COSMOSXpress& #8482;(一个只需点击鼠标即可完成的结构化分析向导)中进行简单的分析来检验设计的完整性并降低材料用量和成本。在设计流程的早期和整个过程中都应该经常进行 COSMOSXpress 分析。

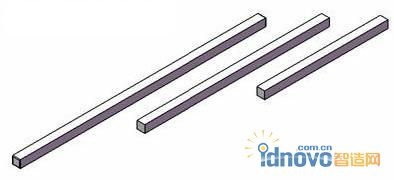
Tip #9 – 使用设计表格创建零件组和装配体。
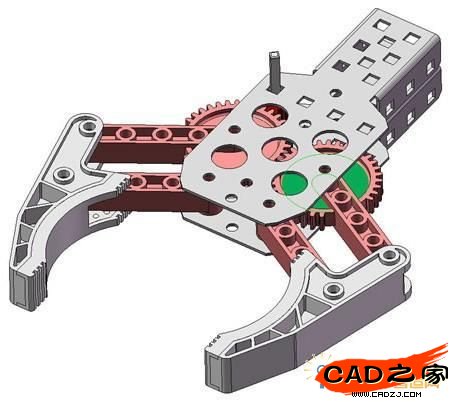
设计表格可用于创建具有相似特征和属性的多种版本的零件组。VEX 轴会加工成三种尺寸:2 英寸、3 英寸和 4 英寸。通过设计表格控制大小尺寸,您只需创建零件一次即可。因为 SolidWorks 是一种 OLE/2 应用程序,所以它使用 Microsoft Excel® 电子表格来编排设计表格,这些表格可导入到 SolidWorks 文档中。设计表格可包括更多值,例如颜色、零件号、描述、标记、材料、质量和其它由用户定义的属性。在装配体中,您可使用设计表格来创建模型的各种变体,还可以使用配置来控制开合位置,例如控制此机械爪的爪子的开合。

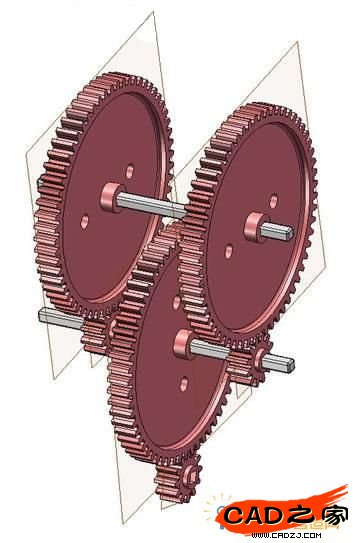
技巧 10 – 装配零件以模拟运动。
装配体包含零件和/或其它装配体的 3D 排布,还表示模型的物理行为。您可通过物理动力学和动画在装配体中模拟运动。尽管可通过很多方法来以静态方式装配模型,但若要根据物理行为来约束模型,您需要回答一些问题:我如何装配机器人部件?如何拆解机器人?机器人部件如何平移和旋转?
在 SolidWorks 软件中,您可使用 Assembly(装配)工具栏中的Mate(配合)工具来组合部件。3D 空间中的每个部件具有六个自由度:三个平移自由度(沿 X、Y 和 Z 轴方向)和三个旋转自由度(绕 X、Y 和 Z 轴)。机器人框架等部件可能是固定或静态的。静态约束一个部件通常需要三项配合关系。您可使用下列标准配合关系来约束部件:同心、重合、相切、垂直、平行或者通过特定距离或角度对齐。还可使用下列高级配合关系来根据物理行为属性约束部件:齿轮、凸轮、皮带、对称、极限和宽度。#p#分页标题#e#
Physical Simulation(物理模拟)可用于在机器人装配体上模拟马达、弹簧和重力的效果。“物理模拟”会综合模拟元素与 SolidWorks 工具(例如 Mates(配合)和 Physical Dynamics(物理动力学))来移动装配体中的部件。“物理动力学”有助于根据机器人手臂接触的部件来确定其运动范围。受牵引约束的部件受到碰撞后,会在其自由度范围内旋转或者沿受约束或受部分约束的部件滑动。您可使用“物理模拟”的结果来为装配体中的每个零件自动设置载荷条件和边界条件,以用于进行 COSMOSXpress 分析。
VEX 轴的运动取决于马达或其它驱动装置的旋转,且运动是动态进行的。为了模拟此运动,请向 VEX 轴应用 Rotary Motor Physical Simulation(旋转马达物理模拟)工具。若要确定手臂会在哪里与其它部件碰撞,可使用碰撞检测功能。当部件碰撞时,碰撞面会变成绿色。
技巧 11 – 测试干涉情况和易维护性
在加工零件前,您可通过干涉检测来测试装配体中部件间的干涉情况,这样既省时又省力。干涉检测可用于快速分析干涉情况,还具有忽略特定干涉以及检测或忽略重合曲面的功能。通过碰撞检测,可确定装配体的部件移动和旋转时装配体的运动范围。通过分解图动画,有助于确定机器人设计是否易于装配或拆解。当您制作分解图时,请想想如何拆解机器人。当进行分解图动画演示时,模拟过程会显示如何拆解机器人。另外,别忘了考虑紧固件,现场维修机器人时,需要操作紧固件。请将所有的紧固件、螺钉、螺母和螺栓合并到通用配件文件夹中,您可选择显示或隐藏该文件夹。

技巧 12 – 在工程图中使用配置和属性。
工程图包含用于记录零件或装配体的信息。您可将在零件图或装配图中定义的配置和属性插入到工程图中。例如,VEX 轴采用 6061 铝合金,该零件在相应的工程图中包含三种配置,材料 6061 铝合金会自动出现在标题栏中。您还可以将在零件图中标注的公差信息传递到工程图中。

技巧 13 – 尽早共享您的设计并进行协作。
可采用 eDrawings® 交流、发布和查看软件在设计早期与数量不限的人员通过电子邮件协作并获取反馈。任何人无需额外购买软件即可查看、标注和测量准确的 2D 和 3D 模型图。您的供应商、营销人员、采购代理和队友都可在设计早期帮您识别潜在问题。

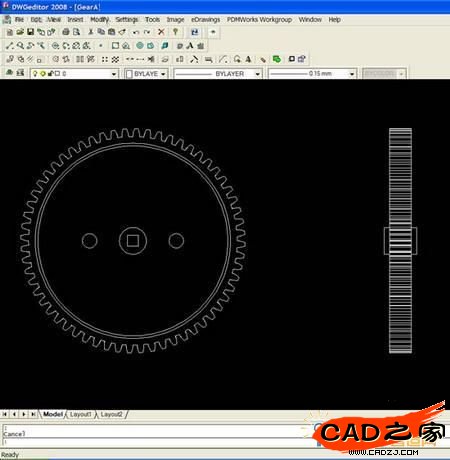
技巧 14 – 重复利用现有数据。
使用 DWGeditor& #8482;,您可采用原始格式来编辑和维护现有的 2D 数据。例如,有人创建了一个带圆孔的齿轮轮廓,其文件格式是 DWG。现在您希望使用相同的齿轮轮廓来制作 3D 齿轮模型,但想为 VEX 轴开一个方形切口,即可重复利用 DWG 文件中的一部分或某些 3D 特征和草图来创建新设计,这样可节省设计时间。

若需关于这些机器人设计技巧的更多信息,请观看 www.solidworks.com/vex 上的电影文件。The Fundamentals of SolidWorks(《SolidWorks 基础》,由 SDC 出版)包含关于 VEXplorer 的更多建模实例。
相关文章
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-28计算机辅助设计与制造 21世纪全国应用型本科大机械系
- 2021-08-28计算机辅助设计与制造(CAD∕CAM)PDF下载
- 2021-08-27计算机辅助设计与制造 21世纪全国应用型本科大机械系
- 2021-08-27计算机辅助设计与制造(CAD∕CAM)PDF下载
- 2021-08-24经典技法118例AutoCAD 机械设计经典技法118例中文版_
- 2021-08-24经典实例学设计AutoCAD 2016从入门到精通 [李轲 编著]
- 2021-08-24精通AutoCAD 2013电气设计 [李波 主编] 2013年PDF下载
- 2021-08-24精通AutoCAD 2013机械设计_李波,辛雄主编_2013PDF下载
- 2021-08-24精通AutoCAD 2013建筑设计 [刘冰 主编] 2013年PDF下载