2.1 摆线轮相关参数的计算
可根据原始数据由摆线针轮行星齿轮传动的设计公式求得摆线轮的相关参数。其原始数据包括:输入轴功率Ph=5.5kW,输入轴转速nhc=960 r/min,传动比ihc=-11,摆线轮齿数zc=|ihc|=11,固定针轮数zp=zc+1=12。
根据以上数据由摆线针轮行星齿轮传动的计算公式计算得:针齿中心圆半径rp=100 mm;固定圆半径rbc=91.66 mm;滚动圆半径rg=8.33 ram;短幅系数KI=0.51;摆线轮内孔半径r-=40 mm;针齿圆半径rrp=9 mm;W机构的柱销中心圆半径Rw=63 mm;W机构的柱销数目zw=8;W机构的柱销直径dw=29mm;摆线轮的宽度6c=40 mm。这些设计参数决定了摆线轮的结构,其具体计算过程不再赘述。
2.2仿真实体模型的建立
首先建立仿真实体模型,利用SolidWorks分别创建名为固定圆(rbc=91.66 mm)和滚动圆(rg=8.33mm)的两个圆柱体模型,然后创建一个装配体文件,将固定圆和滚动圆分别调入进行装配。装配关系的设置极为重要,正确与否直接影响着运动仿真的结果。要给固定圆和滚动圆添加高级配合中的齿轮配合,把固定圆和滚动圆看作两个外啮合齿轮,两者的直径比率为183.34:16.66,即固定圆旋转1周,滚动圆旋转11周。把固定圆看作固定件,则滚动圆相对于固定圆一直在作纯滚动,以保证仿真过程中满足摆线轮齿廓曲线的成形原理要求。
2.3运动仿真
完成三维装配之后,可在装配模块下直接进入仿真环境,然后进行仿真设置。具体设置过程如下:
给固定圆部件加一个旋转马达,取角速度值为36(°)/s,仿真时间根据旋转马达转速值计算获得,要求正好为固定圆转过1周所需的时间,由此得仿真时间(即运转周期)为10 s。仿真时间短于10 s会造成摆线轮廓轨迹线不完整,长于10 s则会造成摆线轮廓轨迹线自行相交,导致无法输出轨迹线到SolidWorks部件。定义帧数为5 000,系统将会有5 000个数据测量点。帧的数目影响着生成摆线轮廓的精度,数目越多精度越高,但仿真时间也越长。
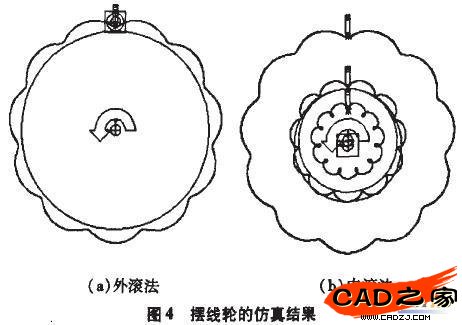
完成以上设置后开始仿真运算,选取滚动圆上一点D0生成轨迹跟踪,具体设置如图3所示。注意,一定要选固定圆作为参考元件,而非系统默认的装配体。因为滚动圆部件相对于固定圆部件作纯滚动,相对于装配体只是在转动。仿真结果如图4所示。

仿真结束后,由仿真结果可直接输出CSV文本文件,即以电子表格的格式输出各数据测量点的坐标值,采用外滚法输出的坐标值数据如表1所示。由输出的各点坐标值可以看出,输出坐标点的个数与仿真设置帧数一致,共有5 000个。因为仿真完成后D0点又回到了初始位置,所以第1个点与第5 000个点的坐标值是相同的。采用内滚法的运动仿真过程及其数据与此基本相同,只是将齿轮的外啮合改为了内啮合。
3 摆线轮三维实体模型的建立
将通过仿真得到的轨迹线(即摆线轮廓衄线)输出到SolidWorks中,利用草图里的偏移命令创建其等距曲线,即可得到摆线轮的实际轮廓线。然后根据摆线轮相关参数,利用特征选项中的拉伸、阵列等操作命令对摆线轮进行三维实体建模,如图5所示。

摆线针轮传动中,标准的摆线轮和针齿啮合时两者之间是没有间隙的,因此理论上讲应该有半数针齿与摆线轮同时啮合传递动力。但实际上在摆线针轮减速器中,为了在啮合面间形成油膜,补偿温升引起的热膨胀及制造误差,同时便于拆装,避免啮合齿面发生胶合等,摆线轮和针齿之间应保留一定的齿侧间隙。因此,实际的摆线轮不能采用理论齿形,而必须经过修正。制造摆线轮时,一般要对标准的摆线轮进行修形,修形后的实际摆线轮比理论摆线轮要稍小些。
4 结束语
根据摆线的成形原理,利用SolidWorks及其插件COSMOSMotion非常精确地绘制出摆线轮的齿廓工作曲线,绘图步骤非常简单,齿廓工作曲线精度也可以根据要求随意调整。在此基础上,利用SolidWorks建立了摆线轮的三维实体模型,为下一步基于虚拟样机技术的性能仿真、有限元分析及摆线轮的加工制造奠定了基础。同时,为复杂轮廓零部件的设计提供了一种方法和捷径,可以通过运动仿真,结合轮廓曲线的发生原理,利用轨迹跟踪法生成各种复杂的轮廓曲线,简化了设计过程。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF