副标题#e# 0前言
机械系统动力学分析是一个很古老的研究课题,现在的解决方法已经很多。随着较大型的计算机软件的不断发展,需要一种简单实用、直观精确的研究方法。笔者发现,三维设计软件SolidWorks建模较为简单,初学者容易上手,加之后期版本中无缝集成了全功能运动仿真软件COSMOSMotion,可以对复杂机械系统进行完整的运动学仿真和动态静力学分析。若将其仿真得到的大量机械系统运动及动力学参数(诸如每个零部件的动能曲线、系统平衡力矩曲线等),运用Excel电子表格进行处理就可以建立起机械系统的动力学模型,然后用微分方程的数值解法--差分法就可以很容易地求解出机械系统在稳定运转阶段的真实运动规律。
基于这种思路,笔者以牛头刨床为例,经过多次反复试验摸索,最终得到了一种较为简单的机械系统动力学分析方法。即,首先利用Solidworks软件建立机械系统三维模型,然后用COSMOSMotion软件进行运动仿真,并将其仿真结果输出到Excel电子表格中。接着在Excel电子表格中对这些仿真结果进行数据分析处理,从而得到机械系统的等效参数(如等效转动惯量、等效力矩等),建立起机械系统的动力学方程式,最后利用Excel的公式计算功能,求解出动力学方程的数值解-机械系统的真实运动规律。
这种机械系统动力学分析方法,最大的优势在于:SolidWorks操作技术容易掌握;COSMOSMotion仿真功能强大,且对约束、力、力矩、运动等概念的定义与机械原理中的定义一致,容易理解;Excel软件较为常用;整个求解过程不用编程。
以下介绍这种方法在牛头刨床机械系统动力学分析中的应用。
1建立虚拟样机
B650牛头刨床主要由滑枕、摇臂、大斜齿轮、齿轮变速/减速装置、带传动、电机、工作台、进给装置和机身等组成。按照实测数据,在SolidWorks中,对所有零件进行制作、装配,最后得到图1所示虚拟样机(图中机身等零件已隐藏)。从图1中可以反映出主传动路线:电机一带传动(小带轮一大带轮)一花键轴-滑移齿轮组一齿轮轴一大斜齿轮-滑块1(图中不可见)-摇臂及滑块2一连接件、销1及2一滑枕、刀杆。
为了便于分析,假定牛头刨床的齿轮变速装置处于图示的啮合状态。其传动参数如下:小带轮基准直径75mm,大带轮基准直径355mm,花键轴与齿轮轴之间参与啮合的齿轮齿数分别为55和36,齿轮轴与大斜齿轮之间参与啮合的齿轮齿数分别为21和84。
2运动仿真
COsM0sMotion软件仿真功能较强,支持多种约束和虚约束,可分别按位移、速度或加速度定义各种运动,包括定值、步进、谐波、样条曲线和函数等运动。用COSMOsMotion可以仿真各种复杂机械系统的精确运动和进行动态静力学分析。
仿真成功与否的关键在于仿真参数的设置。COSMOSMotion仿真设置包括划分运动和静止零部件、添加运动副约束、定义原动件运动、添加工作阻力等。
2.1零部件分组
在COSMOSMotion中,需要将零部件划分为两类:运动零部件和静止零部件。笔者将与运动分析有关的零部件放到运动零部件组,与运动分析无关的或运动分析时固定不动的零部件设为静止零部件(可将V带设为静止零部件)。为了观察方便,一般将影响观察的静止零部件压缩或隐藏。
2.2添加约束
在进入COSMOSMotion界面时,软件会根据装配图中零部件之间的配合关系自动为零部件添加约束。但在仿真时还应根据具体分析对象和分析内容,对一些约束进行必要的增删调整。
C0SMOSMotion中的"固定副"约束用于锁住2个刚性构件,使之不能做相对运动,相当于现实世界中将2个构件焊接在一起。笔者所研究的牛头刨床中刀杆、连接件与滑枕之间,销1、销2与连接件之间,大带轮、滑移齿轮组与花键轴之间无相对运动,所以它们之间的约束采用"固定副"。
"旋转副"约束只允许2个刚性构件之间有1个自由度的相对转动。牛头刨床中电机与小带轮(含电机转子)之间,花键轴与轴承(相当于机架)之间,齿轮轴与轴承(相当于机架)之间,大斜齿轮(曲柄)与机架(机身)之间,大斜齿轮(相当于曲柄)与滑块l之间,滑块2与机架(机身)之间,摇臂与连接件(或销1)之间均只有1个相对转动,所以它们之间的约束采用"旋转副"。
"移动副"约束只允许2个刚性构件之间有1个自由度的相对移动。牛头刨床中滑块l、滑块2与摇臂之间,滑枕与机架(机身)之间均只有1个相对移动,所以它们之间的约束采用"移动副"。在COSMOSMotion软件中,齿轮传动、带传动的运动仿真是依靠"耦合"来实现的。牛头刨床中的小带轮与大带轮之间为带传动,滑移齿轮组(或花键轴)与齿轮轴之间、齿轮轴与大斜齿轮之间均为齿轮传动,所以应采用"耦合"方式定义它们之间的运动关系。3个"耦合"的传动比分别为355/75、36/55和84/21。
2.3输入运动
为了分析方便,选取大斜齿轮(相当于导杆机构之曲柄)作为系统运动分析时的原动件,其转速可按真实系统中的转速n4设定。
故在COSMOSMotion界面,设置大斜齿轮的转速为"恒定值"720(°)/s。
原动件转速也可以任选。因为建立等效动力学模型时,在系统等效转动惯量和等效力矩计算中使用的是各构件与原动件速度的比值,而与真实速度无关。
2.4添加工作阻力
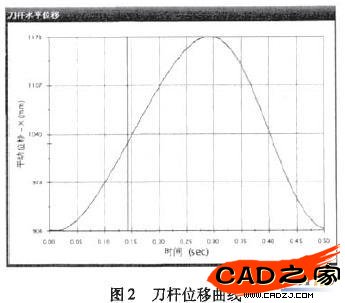
由于刀杆只在切削工件时有工作阻力,所以需要先进行运动仿真,得到刀杆的位移曲线(图2),才能确定出工作阻力P与仿真时间t之间的函数关系式:
这样就可以在COSMOSMotion中以函数形式为"刀杆"零部件添加工作阻力,其表达式为:IF(TIME-0.0472:0,7 000,IF(TIME-0.256 25:7000,0,IF(TIME-0.5:0,0,0)))。
机械系统动力学分析是一个很古老的研究课题,现在的解决方法已经很多。随着较大型的计算机软件的不断发展,需要一种简单实用、直观精确的研究方法。笔者发现,三维设计软件SolidWorks建模较为简单,初学者容易上手,加之后期版本中无缝集成了全功能运动仿真软件COSMOSMotion,可以对复杂机械系统进行完整的运动学仿真和动态静力学分析。若将其仿真得到的大量机械系统运动及动力学参数(诸如每个零部件的动能曲线、系统平衡力矩曲线等),运用Excel电子表格进行处理就可以建立起机械系统的动力学模型,然后用微分方程的数值解法--差分法就可以很容易地求解出机械系统在稳定运转阶段的真实运动规律。
基于这种思路,笔者以牛头刨床为例,经过多次反复试验摸索,最终得到了一种较为简单的机械系统动力学分析方法。即,首先利用Solidworks软件建立机械系统三维模型,然后用COSMOSMotion软件进行运动仿真,并将其仿真结果输出到Excel电子表格中。接着在Excel电子表格中对这些仿真结果进行数据分析处理,从而得到机械系统的等效参数(如等效转动惯量、等效力矩等),建立起机械系统的动力学方程式,最后利用Excel的公式计算功能,求解出动力学方程的数值解-机械系统的真实运动规律。
这种机械系统动力学分析方法,最大的优势在于:SolidWorks操作技术容易掌握;COSMOSMotion仿真功能强大,且对约束、力、力矩、运动等概念的定义与机械原理中的定义一致,容易理解;Excel软件较为常用;整个求解过程不用编程。
以下介绍这种方法在牛头刨床机械系统动力学分析中的应用。
1建立虚拟样机
B650牛头刨床主要由滑枕、摇臂、大斜齿轮、齿轮变速/减速装置、带传动、电机、工作台、进给装置和机身等组成。按照实测数据,在SolidWorks中,对所有零件进行制作、装配,最后得到图1所示虚拟样机(图中机身等零件已隐藏)。从图1中可以反映出主传动路线:电机一带传动(小带轮一大带轮)一花键轴-滑移齿轮组一齿轮轴一大斜齿轮-滑块1(图中不可见)-摇臂及滑块2一连接件、销1及2一滑枕、刀杆。
为了便于分析,假定牛头刨床的齿轮变速装置处于图示的啮合状态。其传动参数如下:小带轮基准直径75mm,大带轮基准直径355mm,花键轴与齿轮轴之间参与啮合的齿轮齿数分别为55和36,齿轮轴与大斜齿轮之间参与啮合的齿轮齿数分别为21和84。

2运动仿真
COsM0sMotion软件仿真功能较强,支持多种约束和虚约束,可分别按位移、速度或加速度定义各种运动,包括定值、步进、谐波、样条曲线和函数等运动。用COSMOsMotion可以仿真各种复杂机械系统的精确运动和进行动态静力学分析。
仿真成功与否的关键在于仿真参数的设置。COSMOSMotion仿真设置包括划分运动和静止零部件、添加运动副约束、定义原动件运动、添加工作阻力等。
2.1零部件分组
在COSMOSMotion中,需要将零部件划分为两类:运动零部件和静止零部件。笔者将与运动分析有关的零部件放到运动零部件组,与运动分析无关的或运动分析时固定不动的零部件设为静止零部件(可将V带设为静止零部件)。为了观察方便,一般将影响观察的静止零部件压缩或隐藏。
2.2添加约束
在进入COSMOSMotion界面时,软件会根据装配图中零部件之间的配合关系自动为零部件添加约束。但在仿真时还应根据具体分析对象和分析内容,对一些约束进行必要的增删调整。
C0SMOSMotion中的"固定副"约束用于锁住2个刚性构件,使之不能做相对运动,相当于现实世界中将2个构件焊接在一起。笔者所研究的牛头刨床中刀杆、连接件与滑枕之间,销1、销2与连接件之间,大带轮、滑移齿轮组与花键轴之间无相对运动,所以它们之间的约束采用"固定副"。
"旋转副"约束只允许2个刚性构件之间有1个自由度的相对转动。牛头刨床中电机与小带轮(含电机转子)之间,花键轴与轴承(相当于机架)之间,齿轮轴与轴承(相当于机架)之间,大斜齿轮(曲柄)与机架(机身)之间,大斜齿轮(相当于曲柄)与滑块l之间,滑块2与机架(机身)之间,摇臂与连接件(或销1)之间均只有1个相对转动,所以它们之间的约束采用"旋转副"。
"移动副"约束只允许2个刚性构件之间有1个自由度的相对移动。牛头刨床中滑块l、滑块2与摇臂之间,滑枕与机架(机身)之间均只有1个相对移动,所以它们之间的约束采用"移动副"。在COSMOSMotion软件中,齿轮传动、带传动的运动仿真是依靠"耦合"来实现的。牛头刨床中的小带轮与大带轮之间为带传动,滑移齿轮组(或花键轴)与齿轮轴之间、齿轮轴与大斜齿轮之间均为齿轮传动,所以应采用"耦合"方式定义它们之间的运动关系。3个"耦合"的传动比分别为355/75、36/55和84/21。
2.3输入运动
为了分析方便,选取大斜齿轮(相当于导杆机构之曲柄)作为系统运动分析时的原动件,其转速可按真实系统中的转速n4设定。
故在COSMOSMotion界面,设置大斜齿轮的转速为"恒定值"720(°)/s。
原动件转速也可以任选。因为建立等效动力学模型时,在系统等效转动惯量和等效力矩计算中使用的是各构件与原动件速度的比值,而与真实速度无关。
2.4添加工作阻力
由于刀杆只在切削工件时有工作阻力,所以需要先进行运动仿真,得到刀杆的位移曲线(图2),才能确定出工作阻力P与仿真时间t之间的函数关系式:
这样就可以在COSMOSMotion中以函数形式为"刀杆"零部件添加工作阻力,其表达式为:IF(TIME-0.0472:0,7 000,IF(TIME-0.256 25:7000,0,IF(TIME-0.5:0,0,0)))。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF