传动齿轮复杂的应力分布情况和变形机理是造成齿轮设计困难的主要原因,而有限元理论和各种有限元分析软件的出现,让普通设计人员无需对齿轮受力做大量的计算和研究,就可以基本掌握齿轮的受力和变形情况,并可利用有限元计算结果,找出设计中的薄弱环节,进而达到对齿轮进行改进设计的目的。
目前,国内在进行相关研究中多应用Ansys软件进行分析,由于Ansys软件的三维建模功能较弱,生成齿轮模霉!!较为困难。因此,常常使用UG、ProE等三维设计软件进行齿轮造型,然后导入Ansys中进行分析,既费时费力,又容易在模型转换过程中产生错误。
本文应用SolidWorks软件完成齿轮建模,无缝导人其集成的有限元软件COSMOS/Works中对研究项目饲料搅拌机中减速器齿轮传动进行接触应力分析,克服了模型转换时产生易错误的问题。根据有限元分析结果,与赫兹公式计算结果进行对比,验证了分析结果的可靠性,在保证结构安全可靠运行的条件下,提高设计制造的效率,降低设计研制成本。
1 齿轮实体建模及其有限元模型的建立
1.1有限元分析的环境
本文使用COSMOS/Works有限元分析软件。COSMOS/Works是SRAC(structural research analysis corporation,SRAC)推出的一套强大的有限元分析软件,COSMOS/Works是完全整合在SolidWorks中设计分析系统的,可以根据模型迅速地进行各种类型的分析,如静态分析、频率分析、热分析、弯曲分析等,并输出多种图解,如应力、应变、形变、位移等。由于COSMOS/Works是完全整合在SolidWorks软件中,因此,在SolidWorks中完成的齿轮模型可直接转入COSMOS/works中进行网格划分和分析。
1.2齿轮实体建模及其有限元模型的建立
1.2.1齿轮的建模
问题描述:设计一饲料搅拌机减速器,输入功率P1=7kW,小齿轮转速n1=540r/min。减速器高速级一对相互啮合的齿轮材料均为45号钢,弹性模量E=2.06×105N·mm2,泊松比μ=0.3。给定齿轮的基本参数如下:
齿轮模数m为3,压力角α为20°,齿数z1、z2分别为24、77,齿宽b为75mm。
采用SolidWorks软件进行齿轮实体建模,使用SolidWorks的Geart FaX插件完成齿轮实体建模。进行齿轮接触应力分析要将传动的齿轮装配到一起,并保证正确的啮合位置。确定二齿轮在啮合线上相啮合的各个位置,先将二齿轮旋转到节点相啮合的位置。由于在分度圆上齿轮的齿厚和齿间距相等,则小齿轮转到节点啮合位置就要转动90°/24°,大齿轮转到节点啮合位置就要转动90°/77°,即可使2个齿轮在节点处相啮合。装配并正确啮合的模型如图1所示。
1.2.2创建接触对
利用COSM0S/Works接触向导将啮合小齿轮的齿廓面1和大齿轮的齿廓面2设置为接触对,使齿廓面1为源接触面,齿廓面2为目标接触面。设置接触面摩擦系数0.15。同理设置啮合小齿轮的齿廓面3和大齿轮的齿廓面4为接触对(图2)。
1.2.3模型的网格划分
网格划分是有限元分析的关键步骤,实体建模的最终目的是划分网格以生成节点和单元。生成节点和单元的网格划分过程包括二个步骤:
1)定义单元属性;
2)定义网格生成控制并生成网格。
网格的划分对有限元分析的计算量和准确性影响很大,一般网格划分越小,计算精度越高,所需的计算机资源、运算时问也越多倒5。因此,进行有限元分析时一般需要对模型进行适当的处理,并对需要分析的关键部位实施网格生成控制。本文中对两对齿轮接触面实施网格细化处理。网格化后节点总数319643,单元总数21 1787。完成网格化的模型见图3。
1.2.4约束条件与载荷
根据工作的实际情况,将大齿轮内表面设定为固定约束。小齿轮内表面设定为圆柱约束,并对轴向、径向移动进行约束,使其只有绕齿轮回转中心轴的转动自由度。
在小齿轮内表面上施加扭矩载荷,扭矩载荷采用式(1)计算:
目前,国内在进行相关研究中多应用Ansys软件进行分析,由于Ansys软件的三维建模功能较弱,生成齿轮模霉!!较为困难。因此,常常使用UG、ProE等三维设计软件进行齿轮造型,然后导入Ansys中进行分析,既费时费力,又容易在模型转换过程中产生错误。
本文应用SolidWorks软件完成齿轮建模,无缝导人其集成的有限元软件COSMOS/Works中对研究项目饲料搅拌机中减速器齿轮传动进行接触应力分析,克服了模型转换时产生易错误的问题。根据有限元分析结果,与赫兹公式计算结果进行对比,验证了分析结果的可靠性,在保证结构安全可靠运行的条件下,提高设计制造的效率,降低设计研制成本。
1 齿轮实体建模及其有限元模型的建立
1.1有限元分析的环境
本文使用COSMOS/Works有限元分析软件。COSMOS/Works是SRAC(structural research analysis corporation,SRAC)推出的一套强大的有限元分析软件,COSMOS/Works是完全整合在SolidWorks中设计分析系统的,可以根据模型迅速地进行各种类型的分析,如静态分析、频率分析、热分析、弯曲分析等,并输出多种图解,如应力、应变、形变、位移等。由于COSMOS/Works是完全整合在SolidWorks软件中,因此,在SolidWorks中完成的齿轮模型可直接转入COSMOS/works中进行网格划分和分析。
1.2齿轮实体建模及其有限元模型的建立
1.2.1齿轮的建模
问题描述:设计一饲料搅拌机减速器,输入功率P1=7kW,小齿轮转速n1=540r/min。减速器高速级一对相互啮合的齿轮材料均为45号钢,弹性模量E=2.06×105N·mm2,泊松比μ=0.3。给定齿轮的基本参数如下:
齿轮模数m为3,压力角α为20°,齿数z1、z2分别为24、77,齿宽b为75mm。
采用SolidWorks软件进行齿轮实体建模,使用SolidWorks的Geart FaX插件完成齿轮实体建模。进行齿轮接触应力分析要将传动的齿轮装配到一起,并保证正确的啮合位置。确定二齿轮在啮合线上相啮合的各个位置,先将二齿轮旋转到节点相啮合的位置。由于在分度圆上齿轮的齿厚和齿间距相等,则小齿轮转到节点啮合位置就要转动90°/24°,大齿轮转到节点啮合位置就要转动90°/77°,即可使2个齿轮在节点处相啮合。装配并正确啮合的模型如图1所示。

1.2.2创建接触对
利用COSM0S/Works接触向导将啮合小齿轮的齿廓面1和大齿轮的齿廓面2设置为接触对,使齿廓面1为源接触面,齿廓面2为目标接触面。设置接触面摩擦系数0.15。同理设置啮合小齿轮的齿廓面3和大齿轮的齿廓面4为接触对(图2)。

1.2.3模型的网格划分
网格划分是有限元分析的关键步骤,实体建模的最终目的是划分网格以生成节点和单元。生成节点和单元的网格划分过程包括二个步骤:
1)定义单元属性;
2)定义网格生成控制并生成网格。
网格的划分对有限元分析的计算量和准确性影响很大,一般网格划分越小,计算精度越高,所需的计算机资源、运算时问也越多倒5。因此,进行有限元分析时一般需要对模型进行适当的处理,并对需要分析的关键部位实施网格生成控制。本文中对两对齿轮接触面实施网格细化处理。网格化后节点总数319643,单元总数21 1787。完成网格化的模型见图3。

1.2.4约束条件与载荷
根据工作的实际情况,将大齿轮内表面设定为固定约束。小齿轮内表面设定为圆柱约束,并对轴向、径向移动进行约束,使其只有绕齿轮回转中心轴的转动自由度。
在小齿轮内表面上施加扭矩载荷,扭矩载荷采用式(1)计算:
![]()
2结果与分析
COSM0S/Works通过彩色云图显示应力和应变的分布,以不同的颜色表示不同范围的应力值,能形象逼真地表现齿轮内部的应力应变分布情况。本研究分析结果见图4、图5。
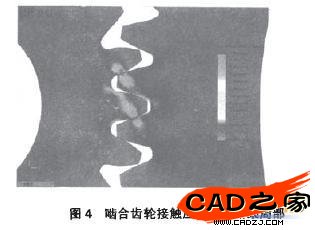
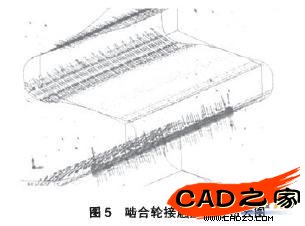
由图4和图5可以看出,齿轮齿根处、齿面接触面应力集中,最大应力为508.3MPa。经查表可知,材料为45号钢的齿轮接触疲劳强度极限为550MPa,因此满足设计要求。
按赫兹公式计算齿面接触应力aH,见式2。
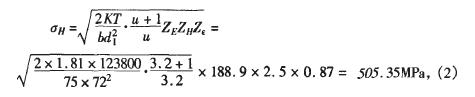
下面采用赫兹公式验证上述分析结果的正确性。式(2)中,K为载荷系数,d为小齿轮分度圆直径,M为传动比,磊为弹性影响系数,勿为区域系数,互为重合度系数。
在COSMOS/Works中计算出的最大应力值为508.3MPa,按赫兹公式计算的最大应力值为505.35MPa,以上2个值相差不超过1%。因此,设计的齿轮满足设计要求。
3结论
1)本文采用SolidWorks及COSMOs/Works进行齿轮建模、有限元分析,并对分析结果与计算结果进行对比,证明了所用理论方法和所建模型的正确性。
2)仿真分析进入三维领域后,计算模型将更真实、更精确、更全面,计算结果更加直观、精确。因此,应用有限元法对齿轮变形和应力进行仿真分析是齿轮结构没计的必然趋势。
3)利用有限元和相关有限元分析软件能有效地对齿轮进行模拟仿真,从而可以减少实验费用,将为齿轮的动态设计、优化设计和可靠性设计打下新的基础。
相关文章
- 2021-08-03Autodesk RevitStructure2012应用宝典 [欧特克软件(中
- 2021-08-02Autodesk RevitMEP2012应用宝典 [欧特克软件(中国)有限
- 2021-08-02Autodesk Revit2013族达人速成 [欧特克软件(中国)有限公
- 2021-07-31Autodesk Revit2012族达人速成 [欧特克软件(中国)有限公
- 2021-07-31Autodesk EcotectAnalysis2011绿色建筑分析应用全彩 [
- 2021-07-23AutoCAD 机械设计生产一线实用案例详解2013中文版_北
- 2021-07-23AutoCAD 机械设计入门与提高2014版 [北京兆迪科技有限
- 2021-07-23AutoCAD 机械设计经典教程2013中文版_北京兆迪科技有
- 2021-07-21AutoCAD 机械零部件设计经典范例2014版 [北京兆迪科技
- 2021-07-12AUTODESKREVIT2014五天建筑达人速成 [欧特克软件(中国)