2.3逮拟环境下弧焊机器人的运动学规划
2.3.1弧焊机器人路径规划
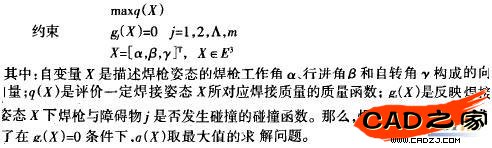
焊接机器人路径规划即对于某一指定焊缝规划出无碰撞的焊接机器人焊枪运动路径,对于弧焊机器人而言,即无碰路径规划。主要包括焊枪位置和焊枪姿态两个方面。在弧焊过程中,焊缝是焊枪位置的约束条件,避免碰撞是焊枪姿态最优化的约束条件,由此可以得出焊枪姿态最优化问题的数学模型:
2.3.2弧焊机器人轨迹规划
焊接机器人轨迹规划即焊接路径转换成焊接机器人各个关节的空间坐标,形成运动轨迹。其主要目标是使机器人避开关节极限和机器人退化区等运动限制,并保持机器人的灵活性与平稳性。本文中焊接机器人与变位机配合使用,将焊接机器人与变位机作为一个整体,认为是一个冗余度机器人系统,将轨迹规划问题表示为多性能指标融合控制问题,包括焊枪姿态函数、避免奇异空间函数、焊枪运动平稳函数和避免关节超限函数。其多性能指标融合轨迹规划的数学模型:

焊接机器人路径规划根据焊接参数提出的工艺要求.规划出无碰的焊枪位置和姿态。焊接机器人的轨迹规划针对具体的机器人运动限制.实现路径规划提出的焊枪位姿要求。
2.4弧焊机器人仿真示教
SolidWorks的Animator插件可以设定运动机构零部件的关键点。所谓"关键点"( Key Frame ),就是零部件的某个特定状态;当零部件的空间位置随时间发生变化时,"关键点"就是零部件运动前后的两个状态。
仿真示教时,首先粗定弧焊机器人的关键点,在Animator下设定的起始位置和终止位置后。如图4(a),(b),拖动时间滑杆设置运动时间,各零部件的运动类型(驱动和从动)由系统根据几何约束自动设定;然后在Weld控制界面下,根据实际情况,对弧焊机器人的位姿参数进行调节,如图4(c),使满足工艺条件;再进行模拟仿真,调整参数,排除运动过程中的奇异点和碰撞干涉点,如图4(d)。整个过程是仿真示教、参数调节一再示教得到最优结果。

在SolidWorks环境下,可以将焊接机器人各个构件的运动参数曲线输出,以旋转台为例,图5(a),(b)为旋转台在示教过程中的角度与速度变化曲线。

3结论
初步建立了弧焊机器人虚拟示教系统的SolidWorks三维实体建模、模型位姿调正、控制参数输人输出、焊接机器人仿真示教等四个模块。给用户提供具有良好临场感的三维虚拟环境和友好的人机交互界面.有助于提高弧焊机器人的工作效率和自动化程度。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF