1.3.2施加运动
模拟装载机采用一次单独铲掘法工作。装载机用1挡直线前进,行驶速度一般在2.5~4.0km/h内;铲斗斗刃沿料堆底部插人.插人深度约为斗底长度时,装载机停止前进;然后转斗油缸运动向上翻转铲斗;翻转铲斗到位后,动臂液压缸运动举伸动臂;举伸动臂到位后,转斗油缸反向运动使铲斗卸载;最后工作装置返回。采用COSMOSMotion内嵌MSC.ADAMS系统提供的阶跃函数STEP(TIME,t1,x1,t2,x2)来完成运动副驱动的设定。
车轮与地面移动副的运动函数为:STEP(TIME,0,0,3,300)
转斗液压缸的运动函数为:

动臂液压缸的运动函数:

1.3.3施加载荷
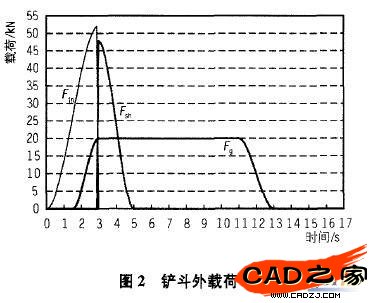
采用一次单独铲掘法工作时,铲斗插入和铲装是顺序进行的,工作装置所受的外载荷有插人阻力Fin,铲取阻力Fsh,物料重力Fg,插人阻力和铲取阻力依次达到最大值,物料重力不发生变化。工作装置所受的外载荷为:

函数图像如图2所示
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF