本文研究了离散点凸轮轮廓在SolidWorks/COSMOSMotion中的曲线设计和后处理。
SolidWorks是当今造型、仿真方面最为流行的三维CAD软件,它具有基于特征进行参数化造型设计特点,模型各个特征的几何形状与尺寸大小用变量参数来表达,变量参数不仅可以是常数,也可以是某种代数式。如果定义某个特征的变量参数发生了改变,则模型的这个特征的几何形状或尺寸大小将随着参数的改变而改变,通过控制各种参数,即可以达到控制模型几何形体的目的。COSMOSMotion是SolidWorks自带的插件,和SolidWorks无缝对接,直接使用SolidWorks的数据库,对系统的运动学、动力学和静力学进行分析和仿真…。对于顶杆运动形式可用连续函数表达的凸轮轮廓曲线设计,可通过用SolidWorks构造基本的模型,在COSMOS Motion中输入凸轮和顶杆的运动约束函数表达式,然后模拟凸轮机构的运行状况,最终设计得到凸轮轮廓曲线。
但在实际应用中,对顶杆的约束往往不能用函数来表示,只明确了几个位置的精确要求,其他位置没有精确的数值要求,把这种情况的凸轮轮廓曲线设计简称为离散点凸轮轮廓曲线设计。离散点凸轮轮廓曲线设计可通过用多项式等函数拟合各离散点,得到约束函数后再用前述的办法来设计。本文将具体研究利用COSMOS Motion自带样条函数自动实现离散点值拟合,模拟运行凸轮机构,生成凸轮轮廓曲线,并对凸轮轮廓曲线进行后处理,最终得到实体凸轮模型。
1在SolidWorks中建立凸轮机构装配关系
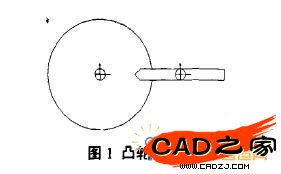
在SolidWorks装配体界面建立如图1所示的装配关系,使凸轮的水平中心线和顶杆中心线重合,为构建准确的装配关系,精确定位凸轮和顶杆的接触点,顶杆的头部可设计成三角形。
2设置约束和运动参数
2.1添加约束
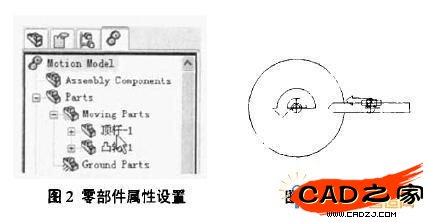
在COSMOSMotion中构建运动模型时,不要按默认推荐情况设置约束和固定零件,应在部件属性设置栏把凸轮和顶杆都设为运动零件,如2图所示。在约束栏对装配体中的凸轮和顶杆分别添加旋转副和移动副约束,如图3所示。
2.2设置运动参数
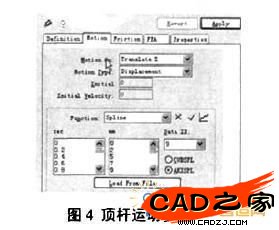
凸轮为匀速转动;如表1所示顶杆往返运动的位移和时间关系不是函数关系,而是离散值。如引言所述,离散点凸轮轮廓曲线设计可通过用多项式等函数拟合各离散点,得到约束函数后再用函数式来驱动,但这样比较复杂,且会产生些累积误差。针对此类问题,COSMOS Motion可直接输入离散值,通过自带样条函数自动实现曲线拟合。如图4所示,在函数项选样条式,并在时间栏和位移栏分别按表1值手动输入,或用载入事先完成的txt或CSV格式的文件。
3仿真参数设置
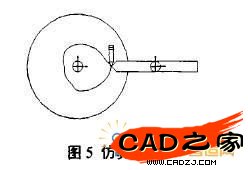
模型仿真运动时,各部件必须刚好完成1个周期的运动,由表l所示顶杆1个循环的时间为4秒,因此要把仿真模拟时间设置为4秒,并把凸轮的转动速度改为90deg/sec,这样凸轮运行4秒后也刚好是1个循环;在结果分析项设置要求输出顶杆顶点对运动轨迹,即凸轮轮廓曲线。仿真运行后得如图5所示结果。

4凸轮轮廓曲线后处理
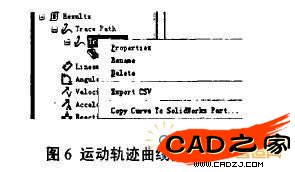
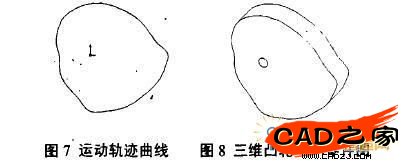
仿真后得到的凸轮轮廓曲线在SolidWorks中不是实体轮廓曲线,不能直接构建实体零件模型,要在SolidWorks中构建凸轮实体零件模型,可如图6所示选复制运动轨迹曲线到SolidWorks选项,把仿真后得到的凸轮轮廓曲线插入到绘制SolidWorks零件模型界面,如图7所示。然后选择前视基准面为草图平面构建实体零件模型,选【转换实体曲线】按钮将运动轨迹曲线转换为实体轮廓曲线,在绘制凸轮轴孔等后,选[拉伸凸台/基体]按钮就可得到三维凸轮实体模型,如图8所示。
5结束语
在凸轮机构顶杆件只明确若干个位置的精确值情况下,也用SolidWorks及COSMOS Motion设计凸轮轮廓曲线,并能把在生成的凸轮轮廓曲线输入到SolidWorks,在此基础上创建三维凸轮实体模型。