本文介绍了SolidWorks虚拟机构创新实践系统相关内容。
创新理论是由美国经济学家J. A. Scnumpter在《经济发展理论》一书中首次提出的,为科技与经济结合提供了比较系统的理论观点、思路、途径和方法。创新是人类和经济发展的源泉,也是培养人才和造就科技人才的重要途径,国家"十一五"规划,提出自主创新。在世界进入知识经济时代,创新更是一个国家国民经济可持续发展的基石。机械创新设计(Mechanical Create Degsin, MCD)是充分发挥设计者的创造力,利用人类已有的相关科学技术成果(含理论、方法、技术、原理等),进行创新构思,设计出具有新颖性、创造性及实用性的机构或机械产品(装置)的一种实践活动。创新是时代发展永恒的主题。随着科技的高速发展,PC及3D设计软件在产品生产中得到了广泛的应用,机械产品的设计和开发已经向3D以及虚拟化方向发展。目前,已经有众多的中高档3D软件被使用,如MDT,SolidWorks,SolidEdge,UG,Pro/E等。由于3D设计软件一般都采用基于特征的参数化造型方法,在此,笔者选用SolidWorks作为三维建模的平台,特别容易对三维虚拟实体零部件的结构特征进行修改,以满足可装配性方面的要求,用它可以建立一系列的模型库,用户进行机构拼装的时候调用所需的模型,按照自行设计的方案对机构进行组装和仿真。
在本文中虚拟实践系统研究的内容为:
1)以连杆机构为研究对象,在SolidWorks中虚拟出各种常用连杆机构的三维模型,存放在模型库中;
2)研究常用连杆机构构成方案,并建立其运动和动力学数学模型,能够进行可视化分析;
3)模型库中零件的参数可以根据需要进行参数化修改,利用SolidWorks里现有的尺寸驱动功能方便地进行模型重建;
4)所建立的机构可以用COSMOSMotion插件进行模拟仿真,能够对机构在运动中发生的干涉进行检查,然后反复修改相应的参数最终达到消除干涉的目的。
1开发工具的选择及系统开发总体结构
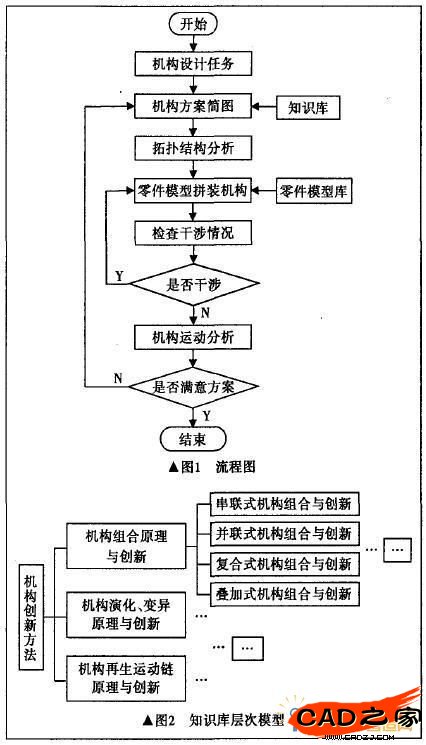
虚拟创新实践系统选用SolidWork。软件作为三维造型的软件平台。Solidworks拥有丰富的应用编程接口(Application Programming Interlace, API) ,是一个基于OLE Automation的编程接口,包含了数以百计的功能函数,可以方便地被高级编程语言调用,内嵌VBA二次开发环境,可以开发我们所需要的应用软件。任何支持OLE和COM的编程环境都可以作为SolidWork,的开发工具。SolidWorks二次开发分为两种,一种是基于自动化技术的,另一种是基于COM的。COM技术可以使用最多的SolidWorks API,并且可以控制SolidWorks的运行方式,生成*. DLL格式的文件,也就是SolidWorks的插件。根据SolidWorks的特点,按照虚拟实践的任务设计了系统运行的流程图,如图1所示。
2创新机构知识库的建立
知识库通常由一条条的经验法则构成,我们将机构创新的方法进行归纳成几个大类,用图2表示。
知识库建立以后,用户利用知识库中的创新原理来为机构制定组成方案,根据每种机构的特性来选择基本的机构,使几种简单的机构拼装在一起后成为所需要的机器。
3模型库的建立
建立模型库是指给定非标准件基本参数,自动生成三维模型。例如在建立圆柱齿轮的三维模型时,只需要输人齿数、模数、螺旋角等几个参数后,就能在solidWorks中自动生成用户所需的三维模型。对于标准件可以把它的规格、型号放在一个数据库中,直接创建标准件数据库,注意数据库中数据的单位应该和计算过程中数据单位保持一致,避免逻辑错误,利用数据库当中存储的数据可直接建立三维模型。用ADO实现VC和数据库之间的数据读写,ADO中的编程模型一般由一个动作序列组成,步骤为:①接到一个数据源;②确定对该数据源的一个查询;③执行该查询;④把查询数据检索到一个能够在C++代码中很容易访问的对象中;⑤如果需要,则更新该数据源,以反映对该数据的编辑;⑥提供检测错误的一般方法。
对于连杆类等具有一系列尺寸的零件,只需要改变长短,无需改动其他尺寸。对于这类零件采用系列零件设计表技术,它是SolidWorks和Excel软件无缝集成的表现,先生成一个连杆,然后调用SolidWorks中的零件设计表模块,把变动的系列尺寸直接输入到Excel中保存起来,与此同时,在SolidWorks的环境管理器中生成与之对应的模型,当需要某长度的模型时,只需双击它重建模型即可马上生成。这样可以方便用户随时调用不同尺寸的杆件进行机构拼装用户在拼装机构的过程中如果没有需要的连杆或其他零件,那么可利用SolidWorks软件新建一个模型后把它放人到模型库中即可,因而不会受到实物的限制,灵活度非常高。
4机构方案的拟定及其评价方法
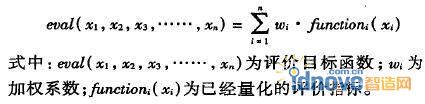
在拟定方案的时候,运用知识库中存储的信息对初始机构进行创新方案分析,如果以前有类似的方案,则用户可以继续使用,还可在此基础上进行改进创新,这样可以提高效率。对于以前没有的方案,首先可以从机构的功能目标人手,按其工作原理拟订方案,其次对机构进行选型组合。例如,可以完成匀速转动的机构有:连杆机构、齿轮机构、行星轮系等;用于非匀速转动的机构有:连杆机构、非圆齿轮机构、挠性件传动机构;往复移动的机构有:连杆机构、齿轮齿条机构、凸轮机构、楔块机构、螺旋机构等。一般情况下,可以找到相应的机构来满足用户需要的运动。在确定基本机构后,要对基本机构进行组合,机构的组合是指在机构选型的基础上,根据功能目标或工艺动作的各种需要,组合创新机构系统。对于已经给出的方案有以下5方面评价内容:功能性、经济性、安全性、可操作性、舒适性。其评价方法是:采用各种功能指标量化法,即把参评的各项功能指标分别乘以加权系数制定出评价函数:先列出每一项评价指标并把它进行量化,然后根据每项指标的重要程度分别赋予不同的加权系数:
在具体实施方案时,用户画出机构简图,从模型库中调人所需的模型进行虚拟装配,让系统按标准对机构方案进行分析验证,检查其是否达到满意的程度,如果满意则可以进行实际装配,否则,重新选择或者改进方案,重新虚拟装配直到得出满意的运动方案为止。
5虚拟装配与构件之间的干涉检测
用户根据已经选定的机构运动方案确定需要用到的各种虚拟零件,将他们共同保存在磁盘的某一个文件夹中,打开SolidWorks软件,新建一装配体文件,将选好的零件依次插人到装配体文件中,在零件之间添加相应的装配配合关系即可。例如:零件之间是通过铰接装配,则可添加转动副;如果是平面接触,则添加移动副。各构件之间的装配关系及其运动副关系定义如下:若是转动副,则在两零件连接处添加端面贴合和同轴心关系;若是移动副,则在两零件接触处添加平面贴合关系。机架和导轨等固定不动的构件通过右击SolidWorks特征管理树(Feature manager)中相应零件的实体名,在弹出的菜单内选择"固定"来实现。由于SolidWorks是基于Windows开发出来的,并且它含有尺寸驱动功能,用户利用这个功能可以对已经建好的装配模型随时修改。当它修改某一个尺寸时,其他的一些关联尺寸也会随之发生相应的改变,而不必拆卸零件重新装配,这在实物装配中是不能实现的。完成虚拟装配后进行干涉检查,例如,检查一个平面连杆机构在同一平面的两个转动副之间是否发生位置千涉,直观检查干涉情况的方法是拖动其中某个构件观察各构件在运动中是否发生位置重叠或者杆件之间是否发生碰撞,如果发生这种情况,则需要调整机构中的某些参数使之避免干涉。
6机构的运动与动力仿真
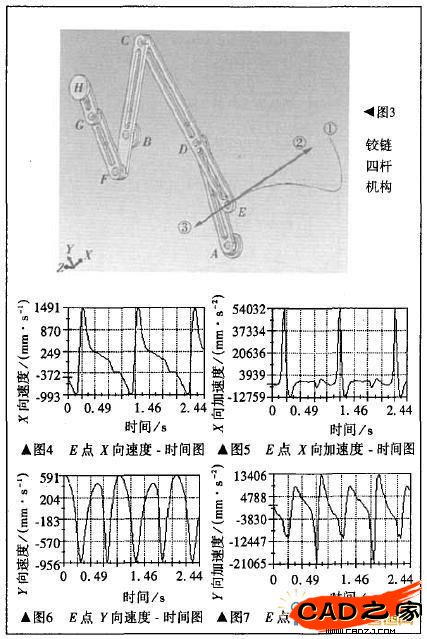
机构的运动仿真是指在每一运动时刻,各个构件在空间中的位置用计算机实时显示出来。其方法有两种:①图解法,把每一个时刻机构的状态绘制出来,通过它来确定机构某点在此刻的位置,这种方法的精度不高;②解析法,它是根据机构的几何关系利用封闭矢量的方法计算出点的位置。因而,运用解析法和计算机相结合就可以计算出杆上某一点不同时刻的不同位置。由于各个构件在原装配关系中有各种约束关系,机构本身特性也就确定了,而机构固定不动的零件放在空间的任何位置不会改变机构上某点运动轨迹的形状。完成运动分析之后,为了判断所设计机构特性的优劣,需要对机构的动力特性加以分析,提取感兴趣点进行位置、速度和加速度分析以便作出机构特性优劣的最后评判。如图3所示曲线①是E点的运动轨迹,带箭头的直线②为E点瞬时速度方向,带箭头的直线③为E点瞬时加速度方向。图4一图7分别是E点X向速度、加速度和Y向速度、加速度图。
7结论
虚拟机构创新实践系统可以帮助用户快速地完成设计任务,通过可视化的运动和动力学分析,在线对机构方案进行修改,从而整理出最优的方案。因此,本系统可以培养用户对机构运动方案的整体认识,培养用户的创新意识、综合设计及工程实践动手能力。用户在机构拼装的过程中熟悉机构及机械设计中出现的典型问题,通过分析,解决问题,可以把运动方案中的一些基本知识点融会贯通,对机构系统的运动特性有一个更加深人的理解。