1.建立四杆机构所需构件
1.1新建文件
启动Pro/E,新建文件:选“零件”/“实体”,文件名默认。
我们可以使用两次拉伸的方法建立四杆机构的第一个构件——机架。见草绘图(图一)。

图1
1.2生成机架实体
底板拉伸深度10,圆柱销拉伸深度12。如(图二)。选择“文件”/“保存副本”,输入新文件名“sg0 1.Prt”。

图2
1.3生成其余构件实体
为提高效率,可在上述实体的基础上,再次进行编辑修改,完成后选择“文件”/“保存副本”,输入新文件名“sg02.prt”,继续进行编辑修改,完成后“保存副本”,表1为各文件名。
表1

机构类型判定:最长+最短(180+70=250)≤其余两杆长度之和(150+130=280),且最短杆为连架杆。机构类型为曲柄摇杆机构。
2.构件组装
构件组装在Pro/E中完成,即利用其“组件/设计”模块。
2.1新建装配文件
执行“文件”/“新建”,选“组件”/“设计”,输入文件名“sgjk.asm”,进入实体装配环境。
2.2装配机架
Pro/E中的装配类型分为约束和连接,约束类型相对两零件只能为固定状态,而连接可以是活动状态,且组装完成后要为完全约束或完全连接定义状态。
执行“插入”/“元件”/“装配”,打开机架文件sg01.prt,约束类型为“缺省”。
2.3装配曲柄
执行“插入”/“元件”/“装配”,打开曲柄文件sg02.prt,连接类型为“销钉”(图三),即((机械基础》教材所指的铰链连接,运动副为低副中的转动副。放置方式为轴与轴对齐,面与面对齐,并分别选择两构件几何特征,操控板显示“完全连接定义”状态。图四为完成曲柄装配后的效果图。Ctrl+Alt+鼠标拖动曲柄,可以动态观察曲柄绕机架圆柱销转动情况。

图3

图4
2.4装配摇杆
摇杆和曲柄均为连架杆,摇杆文件为sg04.prt,方法同曲柄的装配方法。
2.5装配连杆
执行“插入”/“元件”/“装配”,打开连杆文件sg03.prt,首先与曲柄连接,连接类型为“销钉”,单击操控板“放置”/“新设置”,增加与摇杆的连接,并进行相关几何特征选取。完成后如图五,Ctrl+Alt+鼠标拖动曲柄,可以动态观察曲柄带动连杆、摇杆运动,而且,曲柄只可转动,摇杆只可摆动。

图5
3.运动仿真
3.1基本原理
Pro/ENGINEER作为CAD/CAM/CAE系统集成软件,为用户提供了全方位的产品开发功能,集零件设计、产品组装、机构设计与分析、模具设计与数控加工、工程图绘制等功能于一体,可为用户构成十分便捷、功能强大的设计及分析工作平台,解决大量原本看来可能较为棘手的工程问题。机械工程中较为常见的机构可充分利用Pro/ENGINEER的产品组装及机构仿真与分析功能,进行机构设计、仿真及动态分析。
3.2运动仿真基本步骤
3.2.1进入运动仿真环境。执行“应用程序”/“机构”,进入机构运动仿真环境,窗口左侧出现运动仿真特征树,右侧显示运动分析工具栏。
3.2.2设置主动件。单击工具按钮“伺服电机”,在弹出的窗口中图六,选择曲柄与机架的铰接轴作为运动轴,即指定曲柄为主动件,来产生回转运动。选定后效果如图七。
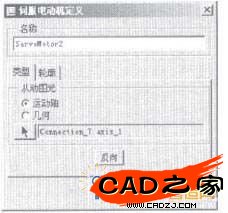
图6
图7
切换到“轮廓”选项卡(图八),选“速度”,A处输入“20”,数值越大,运动速度越快。
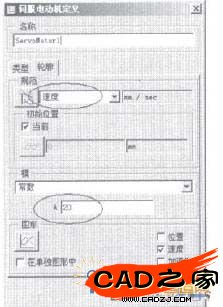
图8
3.2.3运动仿真设置。单击工具按钮“机构分析”,在弹出的窗口中,按图九进行设置,单击“运行”,可以看到四杆机构开始动作,曲柄作整周回转,摇杆左右摆动。30秒后结束,其运行结果将自动保存下来。
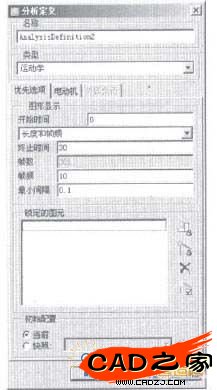
图9
3.2.4运动仿真回放及输出。单击工具按钮“回放”,用播放控制按钮对运动仿真进行回放。单击“捕获”,在弹出的窗口中(图十),可以将动画输出为.mpeg和.avi视频等格式。
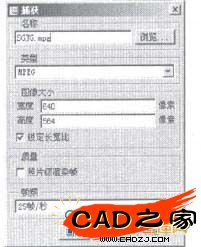
图10
4.运动分析
4.1生成摇杆速度与时间关系的运动分析图
单击工具按钮“生成分析”,在图十一中,单击新建按钮,弹出(图十二)“测量定义”对话框,指定摇杆和连杆的连接轴为分析对象,进行(图十二)设置,按确定。在图十一中,单击按钮,将生成(图十三)的结果,横坐标表示时间,纵坐标表示速度。可见,在不同的时间点,摇杆的速度是不同的。曲线位置低的,运动速度慢,是四杆机构的工作行程,高的部分则是返回行程,急回特性效果明显。同理,也可生成摇杆的加速度与曲柄转动时间的关系图。

图11
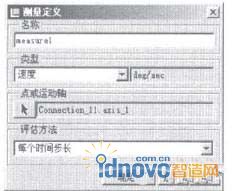
图12

图13
4.2其它运动分析
(1)死点位置分析,以摇杆作为主动件,可以发现连杆与曲柄共线时,运动不确定或无法运动,这是机构的死点位置;
(2)急回特性观察,动画演示中,返回行程要明显快过工作行程;
(3)全局干涉,检测机构在运动中,实体之间相互是否产生运动干涉;
(4)运动轨迹线描绘和构件包络描绘;
(5)机构类型判定,改变各杆件长度,重新装配,得到的运动规律一定符合各机构类型的固有规律,有力地检验了杆长条件和最短杆条件的四杆机构类型判定理论。
5.结束语
Pro/E的CAE功能异常强大,在《机械基础》、《模具设计基础》等专业课程教学中,将平面的、静止的研究对象(如凸轮机构、齿轮传动、冲压模工作过程等),清晰、生动、形象地展示在我们面前,难点也变得容易理解。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF