 液压技术是一项很有发展前途的技术,是实现现代传动和控制的关键技术,其发展速度仅次于电子技术。据有关资料记载,国外生产的95%的工程机械、90%的数控加工中心、95%的自动生产线,都采用了液压与气动技术,其水平的高低已成为一个国家工业发展水平的标志。通过液压泵工况仿真、虚拟拆装动态电子课件的建设,将传统和先进的教学手段相结合,可以增强教学的动态效果,辅助开发学生的智力,培养学生丰富的想象能力以及解决生产实际问题的能力,能更加突出应用型高校“应用型、复合型、刨新型、外向型”人才的培养目标。
液压技术是一项很有发展前途的技术,是实现现代传动和控制的关键技术,其发展速度仅次于电子技术。据有关资料记载,国外生产的95%的工程机械、90%的数控加工中心、95%的自动生产线,都采用了液压与气动技术,其水平的高低已成为一个国家工业发展水平的标志。通过液压泵工况仿真、虚拟拆装动态电子课件的建设,将传统和先进的教学手段相结合,可以增强教学的动态效果,辅助开发学生的智力,培养学生丰富的想象能力以及解决生产实际问题的能力,能更加突出应用型高校“应用型、复合型、刨新型、外向型”人才的培养目标。
1 Pro/E的特点
Pro/E将传统意义上的三维设计提升到服务产品全过程,服务于整个设计团队乃至全球并行设计的一整套完整的产品设计解决方案。PTC提出的单一数据库、参数化、基于特征、全相关及工程数据的再利用等概念改变了MDA的传统观念。在运动仿真模块,能进行运动学及动力学分析,能全行程检查干涉及冲突。
2 液压泵动态电子课件的设计
液压泵动态电子课件的主要设计过程如下:
(1)零件设计;
(2)动态组件设计;
(3)动态机构配置;
(4)执行时间配置;
(5)干涉检查及改进修复;
(6)影像录制;
(7)创建动态点轨迹曲线;
(8)关键点运动参数曲线和极值获取,分析曲线,找出问题,改进设计。
2.1 零件设计
以双联齿轮泵主要零部件齿轮为例,其主要设计造型过程如下:
首先计算齿轮各参数,并使用“工具”-“参数”命令设置其值。使用Pro/E特征创建命令,如拉伸、旋转、混合、扫描、阵列等,创建相应的结构。对复杂的曲面零件,可以使用曲面命令创建其特征。图1为主动齿轮三维造型图。

图1 主动齿轮三维造型图
2.2 动态组件设计
第一个组合的零件一般为基础固定件,常使用缺省放置的方式。在组件下装配零件时,如果零件是运动的,则不能使用放置命令,应使用连接命令定义其类型。零件类型选项主要有圆柱、轴承、刚性、销钉、平面、焊接、球、滑动杆等。

图2 主动齿轮与端盖组合图
以主动齿轮的组合为例,选择连接命令,类型为销钉,点击零件旋转轴,再点选阀体相应轴线,完成轴线定义。然后再选择两零件的贴合面作为平移参照,多数应用场合是两图面接触,必要时可改变轴线方向,以使组合关系符合要求。图2为主动齿轮与端盖组合图。
2.3 动态机构配置
待所有零件装配完成后,就可以进行动态机构的配置。选择“应用程序”-“机构”,进入机构模块。以主动齿轮为例,首先进行连接轴的设置,选中连接轴,在指定参照中点击绿色主体的参照,选择侧板面作为绿色主体,再点击橙色主体下的参照选择齿轮的齿端面,按确定。如图3所示为连接轴设置界面。
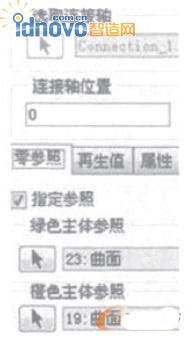 图3 连接轴设置界面
图3 连接轴设置界面
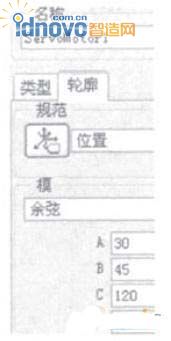
图4 伺服电动机定义
对齿轮副传动、凸轮传动等机构,需要定义从动机构连接,设置相关参数,如齿轮传动轴、分度圆直径等。
接下来,定义伺服电动机,如图4所示。选择机构,伺服电动机,单击新建一个伺服电动机,点击主动齿轮连接轴,按旋转方向的要求决定是否需要反向。点击轮廓,选择规范类型以及初始位置。常用的“位置”类型,模为“余弦”的定义,其含义是为电动机轮廓指定余弦曲线。
q=Acos(360x/T+B)+C
其中:A为幅值;B为相位;C为偏移量;T为周期。
2.4 执行时间配置
 图5 运动的分析定义
图5 运动的分析定义

图6 组合过程中的双联齿轮泵
首先定义运动分析。单击新建,在类型中选择“运动学”,在优先选项中设置开始时间、终止时间、帧频、最小间隔等参数。再选择“电动机”,选择相应的伺服电动机。如果是多个伺服电动机的复合运动,需要详细配置运动时间差,只要合理设置复合运动的各项参数,就能仿真泵的工况运动、泵的组合和分解过程。图5为包含两项复合运动的分析定义,图6为组合过程中的双联齿轮泵。
2.5 干涉检查及改进修复
通过运动仿真,可以及时发现设计中的一些错误。如零件运动干涉问题。干涉检查过程是,首先点击运动分析,选中名称运行即可。再点击回放,模式可以选择全局方式或者2个零件。双联齿轮泵的一般干涉问题主要出现在齿轮啮合中。图7为双联齿轮泵的干涉检查结果。只要针对性地对相应零件的尺寸作些修改调整,即可解决干涉问题。

图7 双联齿轮泵的干涉检查
2.6 影像录制
在回放界面上,点选播放结果集按钮,进入动画界面,即可捕获影像。选择影像保存路径、类型、图像尺寸及帧数后,即可开始捕获。
2.7 创建动态点轨迹曲线

图8 轨迹曲线
齿轮泵类的运动轨迹曲线一般为圆形,运动形式很容易理解。对叶片泵内叶片滑动轨迹曲线,可以在Pro/E的机构模块中按以下方法求得。首先,按分析定义的运动参数运行模型;然后,插入轨迹曲线,指定关键点的位置和曲线类型,如3D,选择结果集,即可产生轨迹曲线。图8(a)是万向节球上某一点的轨迹曲线,图8(b)是叶片泵叶片内侧中间点的轨迹曲线,图8(c)是双回转喷水机构喷头的轨迹曲线。通过对曲线形态的分析,能更清晰地理解机构的运动过程。
2.8 关键点运动参数曲线、极值获取和分析改进
通过创建关键点运动参数曲线,分析曲线的变化规律和极值,对改进设计方案有重要意义j在设计双作用叶片泵的定子内侧叶片运动控制轮廓时,由于转折过渡处处理得不够平稳,从叶片径向运动曲线(图9(a))可以看出,在曲线过渡处,径向加速度很大,极值约为68mm/s2,也就意味着叶片工作时的冲击很大,随之带来的是噪声大和不正常磨损。使用高次曲线能够有效改善叶片泵对定子曲线径向速度、加速度和加速度变化率等项特性的要求,尤其在控制叶片振动、降低噪声方面具有突出的优越性,对高性能低噪声叶片泵的设计工作具有积极意义。图9(b)为对定子曲线作修正后的径向加速度曲线,从图中可以看出,极值约为20mm/s2,曲线特征已经有所改善。
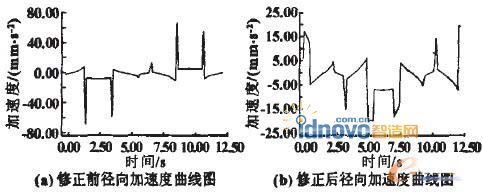
图9 叶片径向加速度曲线图
3 课件的集成调用

图10 零件的集成参考界面
各种类型的泵及各工况仿真设计完成后,还需要将整套电子课件整合起来,由集成的程序界面统一调用和管理。程序界面的设计方法很多,可以使用VB编程,也可以在P盯下直接加链接调用。如果使用P阳调用,所有文件必须全部集中在PPT文件所在的目录内。总界面分成泵总成和泵零件两大类,每一类再依次展开。图10为泵的集成工况参考界面。图11为零件的集成参考界面。
图11 泵的集成工况参考界面
4 结束语
通过多媒体动态电子课件的应用,再结合经典板书、图片讲解、VCD影片、透明元件演示、工业剖面元件传看等教学手段,使学生很快掌握液压泵的基本结构、工作原理和回路构成。同时也了解了液压泵的一种设计方法,以及液压泵设计过程中零部件之间干涉的检查方法。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF