一、前言
工程技术人员基于CAD软件对产品进行研发设计时,参数化设计方法主要是指将模型中的定量信息变量化,使之成为可任意调整的参数。这样,在后期对产品进行装配验证、性能分析时就可以方便地对各种变量化的参数赋予不同数值,从而得到不同大小和形状的零件模型。参数化设计的主要优势在于其能够大幅度提高产品研发设计的效率与质量,从而有效缩短产品的研发设计周期,并降低相关成本。同理,对于CAE分析,借助于参数化,则可以对有限元模型中的部分关键参数进行修改以达到反复分析各种尺寸、不同载荷大小的多种设计方案或者序列性产品(产品不同结构空间尺寸或位置变化),从而极大提高分析效率,减少分析成本。
二、简单的有限元参数化模型
简单的有限元参数化模型主要是指对梁单元的相关截面尺寸(图1)和板壳单元的厚度尺寸(图2),以及在具体位置施加载荷的数值大小进行修改和调整,以校核不同设计方案对结构相关性能的影响。
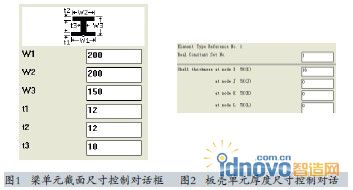
借助于现有的主流有限元模型软件界面的交互操作功能,实现上述功能轻而易举。其主要劣势在于无法实现当结构空间尺寸或位置变化时(如结构整体的长、宽、高尺寸变化或整体的旋转和俯仰等)的参数驱动。
三、全尺寸驱动的有限元参数化模型
所谓全尺寸驱动的有限元参数化模型主要是指在对结构进行有限元分析的过程中,将模型所涉及到的所有不同工况中可能需要调整的相关尺寸进行参数化设计。这样,当参数化模型确定后,便可以在短时间内分析结构所有工况及不同的结构方案,从而快速确定结构的最优设计方案及其相关性能。当前,全尺寸驱动的有限元模型参数化建模方法主要有两种趋势:①界面交互方式几何模型驱动;②专用程序语言驱动。这两种有限元模型的参数化建模方法主要来自于两种不同类型的有限元模型分析软件。
1.界面交互方式几何模型驱动
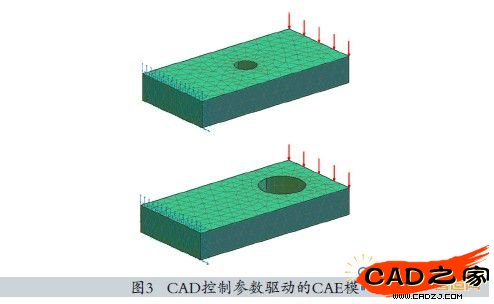
以界面交互方式几何模型驱动为主的有限元模型参数化建模方法,主要来自于在CAD软件基础上发展起来的CAE分析软件,其充分发挥既成的在CAD参数化设计功能方面的优势,将CAD中的几何模型与CAE模型中的前处理模型完全关联起来,当CAD模型通过控制参数发生改变时,有限元模型会随之产生相同的变化,并自动完成有限元网格的更新与划分,且保持先前的边界条件不发生变化,从而实现利用CAD的参数化驱动有限元模型的参数化。如图3所示,当孔的大小和位置在CAD模型中通过参数化控制使其尺寸改变后,进入到CAE模块时,有限元模型会自动更新而不再需要做任何处理。
这种方法处理起来简单,很适合在CAD基础上想进一步学习并掌握CAE分析的工程技术人员。但是,这种方法同时也有一定的局限性,当结构相对较为复杂且驱动尺寸较多时,更新处理就会相对困难,甚至出现错误。而且,其仅能对结构几何模型的相关参数进行驱动,而且模型的适用性也有一定的局限性,主要以实体(3D单元)模型见长。
2.专用程序语言驱动
以专用程序语言驱动为主的有限元参数化建模方法,主要来自于专业的有限元分析软件,其除了界面交互功能外,还提供专门的参数化语言程序端口。借助于相对较为简单的专用程序语言不但可以实现建模、加载以及后处理过程的参数化分析,而且还可以开发专用有限元分析程序,或者编写经常重复使用的功能小程序,实现特殊载荷的施加或按规范对结构局部进行强度和刚度的校核等。总之,程序语言在很大程度上扩展了有限元分析之外的能力,提供建立标准化零件库、序列化分析、设计修改、设计优化以及更高级的数据分析处理能力。
但是,由于有限元分析过程中程序语言的书写,要求所涉及到的关键点、线、面和体以及节点、单元的编号准确无误,所以这种方法对于以梁单元为主的结构模型、简单的板壳单元模型和实体单元模型较为适用。对于复杂的板壳单元模型,由于结构某处增加或减少筋板时,整个结构的面编号会发生很大变化,若再在程序语言中调整相关面的编号的话,会浪费更多的精力和时间,反而不如直接利用界面交互方式进行设计分析的效率高。
四、结构参数化模型创建举例
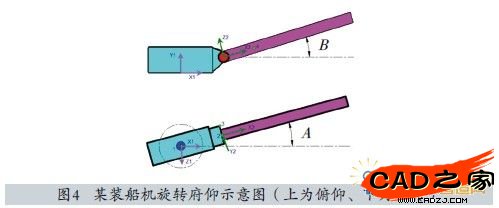
图4所示为某装船机回转与俯仰结构示意图,以回转角度A和俯仰角度B为控制参数,简单介绍一下通过程序语言(以 APDL语言为例)实现参数化建模的方法。由于旋转轴与俯仰轴 不相交,所以需要创建两个局部坐标系分别用于单独回转部分 和既回转又俯仰部分的建模。用于单独回转部分的局部坐标系 通过“local,11,0,a,b,c,0,0,A”命令(其中,a、b和c是编号为11的局部坐标原点在总体坐标系中的坐标)很容易创建。而用于既回转又俯仰部分的局部坐标系,仅需要在上步创建的局部坐标系中创建出参考节点2、3和4(2点位于俯仰铰轴的中点),其中节点4是通过命令“ngen,2,2,2,L*cos(B),L*sin(B),0”(L为节点4至节点2的距离,可任意赋值)创建,这样再利用命令“cs,12,0,2,4,3”创建出编号为12的第二个局部坐标系,然后在此局部坐标下对既回转又俯仰部分进行建模。如此,便可实现对回转角度A和俯仰角度B的参数化控制。#p#分页标题#e#
五、结论
通过参数化控制进行有限元分析,可以大幅度提高工作效率,减少分析成本。对有限元模型进行参数化建模时,界面交互式几何模型驱动方法主要适用于结构相对较为简单的实体模型,而基于专用程序语言的驱动方法主要适用于以梁单元为主的结构模型、简单的板壳单元模型和实体单元模型。前者在CAD软件的基础上学习起来,相对较为简单,而后者则需要操作者不但要熟练掌握有限元分析软件界面的操作方法,还必须具备一定的程序语言编写基础。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF