1 引言
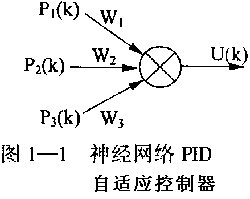
系统是针对制氧机厂W160型落地镗床X、Y、Z3个进给最高转速为3 000r/min,最低转速≤30r/min的直流电动机,实现静态无静差S=0、调速范围D≥1 000;动态电流超调量σι/%≤5%、速度超调量σn%≤10%无级调速系统。直流可逆双闭环调速系统中,需要两级PID控制器进行调节,但要实现如此高精度的调速,单纯采用常规的PID控制器,很难达到系统的要求。随着神经网络理论的发展,将应用最广泛的PID控制器与具有自学习功能的神经网络相结合,已成为智能控制的一个新方向,并在这一方面取得了一些研究成果 [2,3]。其中由单神经元构成的PID自适应控制器,是将PID控制规律融进神经网络之中,实现神经网络与PID控制规律的本质结合,共同完成PID白适应调节。其网络结构如图1—1所示,它是由比例、积分、微分2个单元组成的一种动态前向网络,各层神经元个数、连接方式、连接权值是按PID控制规律的基本原则和已有的经验确定的,能够保证系统的稳定和快速收敛。文中用PLC实现神经网络PID自适应控制,并应用于直流逻辑无环流可逆调速控制系统,使系统的控制精度达到了只有理论上才能实现的无静差。
2 PLC控制系统的组成
根据W160型落地镗床直流调速系统动、静态性能指标的要求,考虑到该设备的控制设备、器件数量多、对系统运行安全可靠提出的更高要求,采用高可靠性的PLC作为控制核心,以晶闸管为执行机构的直流调速控制系统,取代原设备的交流电动机一发电机一直流电动机庞大的调速系统。PLC实现的调速系统如图2—1所示。系统主要由两部分构成,系统框图如图2—2所示。其中PLC实现神经网络PID自适应控制器与逻辑无环流双闭环的控制部分,长划线一点一点虚线框内为(V--M)三相桥式晶闸管一电动机系统,GT为V--M系统的晶闸管触发电路,它由硬件实现。短划线虚线框内为换向软开关,由PLC软件实现。
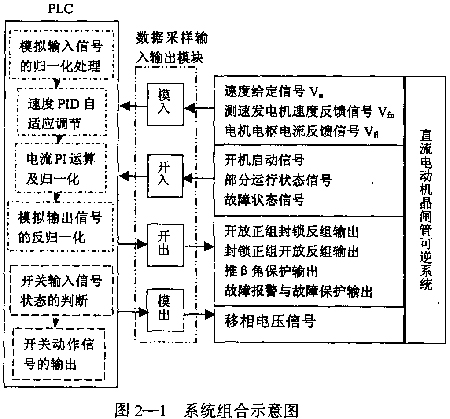
该系统为速度、电流双闭环调速系统,也就是说PLC对这3个模拟输入信号分别进行速度调节器和电流调节器相串联的两级PID运算,向晶闸管的触发电路给出移相电压信号。所以,系统跟随的快速性及控制精度关键取决于PID调节器的设计和调节精度。采用单神经元组成的PID自适应控制器,既有传统PID控制器的优点,又有神经网络的并行结构和学习记忆功能,并且结构简单,易于实现,所以它更适合于控制系统。
3 PID自适应控制器
常规PID控制算法为:
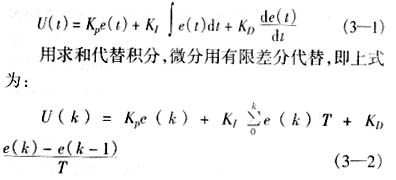
式(3-2)中T为采样周期,Kp是比例系数,K1=Kp=TI是积分比例系数,KD=KPTD是微分比例系数。
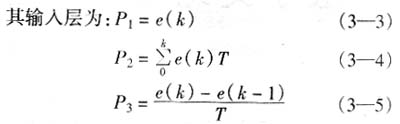
根据上式,组成由两层线性神经网络构造的控制器,如图1—1所示。
以梯度法可得神经网络PID控制系数修正式:
其中r为系统给定值,Y为系统输出值,Lr为学习步长:0<Lr<1
对于Wi的初值及学习步长,它不仅关系到是否达到全局最小点,而且也影响学习时间的长短#p#分页标题#e#[4]。对于该文所针对的高精度、快响应系统尤为重要。
4 基于PLC的自适应控制方法
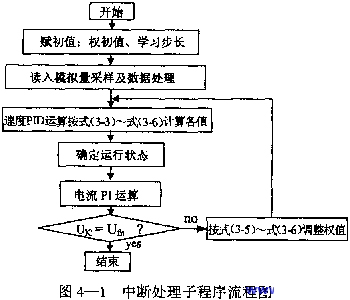
在直流双闭环调速系统中,为了提高系统响应的快速性和限流的必要性,电流内环仍然采用传统的PI调节器,而转速环则采用神经网络PID自适应控制器,以提高系统的鲁棒性。这两级相串联的PID运算都由PLC实现,把这一运算环节作为中断程序来处理。PLC的PID自适应控制中断处理子程序流程如图4—1所示。
根据系统所要实现的功能以及PLC顺序执行程序的特点,编写PLC的程序。
选用西门子公司S7—200系列的PLC进行系统配置。根据逻辑无环流可逆直流调速系统实际运行的要求,PLC主要实现了两级串联PID自适应调节及逻辑换向。同时,还实现了系统保护功能和系统显示功能。
5 结束语
用PLC实现的神经网络PID自适应控制器应用于调速系统,控制精度高,而且经济可靠、抗干扰能力强,在允许负载、电枢电阻和转动惯量变化的范围内,都能保持响应的快速性以及无静差、无超调的优良性能。它特别适用于机床控制系统,既可以实现调速部分,同时也可利用PLC顺序控制的应用特点,替代其余的继电器控制部分,这样可使系统结构紧凑,便于维护。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-28计算机辅助设计与制造 21世纪全国应用型本科大机械系
- 2021-08-27计算机辅助设计与制造 21世纪全国应用型本科大机械系
- 2021-08-23零基础学AutoCAD 2012电气制图工程应用 [张立富,陈刚,彭
- 2021-08-22AutoCAD 室内装潢设计应用大全中文版 [马永志,郑艺华,刘
- 2021-08-22AutoCAD 2013应用与开发系列中文版AutoCAD 2013室内装
- 2021-08-22AutoCAD 2013应用与开发系列中文版AutoCAD 2013机械图
- 2021-08-14新编AutoCAD 2004中文版计算机辅助设计应用技能培训教