本文探讨了应用虚拟现实的数控加工中心培训系统相关内容
0.引言
长期以来, 我国数控方面高深层次人才的匮乏和流失, 成为阻碍我国数控技术发展的最大障碍。企业有资金引进高精密的数控设备, 却寻找不到能够维护和熟练操作的人员, 面对厚重的用户手册无力消化吸收, 更谈不上技术的改造和创新。由此可见, 人才竞争是根本, 人才战略是关键。数控技术的复杂性决定了引入高效、直观的培训机制是提高人才素质的有效途径, 而此培训机制的关键是要开发一套适合学员的培训系统。随着利用VRML和JAVA开发的虚拟现实技术和USB技术的日益成熟, 可以很好地解决了这个难题。这套技术结合计算机图形学、图像处理学、模式识别、智能接口、人工智能、传感器、网络和并行处理等多学科的虚拟现实技术使得人机交互方式有了质的突破。
虚拟现实技术应用于数控加工中心的培训系统中, 就是通过计算机产生数控加工中心、被加工工件的虚拟造型, 加入音响效果和运动仿真, 并配有控制面板, 学员根据虚拟环境提供的视觉、听觉、触觉感受, 可以感受到与操作实际的数控加工中心一样的状态。与传统的数控加工中心培训相比, 此系统摆脱了“试切”、“轨迹显示”等方法, 极大地提高了系统的主动性、交互性和沉浸感等性能, 给学员逼真的感受, 改善了数控加工培训的教学效果, 并且大大降低了开发成本。
1.Java和VRML通信实现机理
Java是Sun公司于1995年5月23日推出的, 当时并没有引起太多的注意。但是随着Internet的迅猛发展, 环球信息网WWW 的快速增长, 促进了Java语言研究的进展, 使得它逐渐成为Internet上受欢迎的开发与编程语言。Java语言具有简单、面向对象、分布式、解释执行、鲁棒、安全、体系结构中立、可移植、高性能、多线程以及动态性的特点, 正是这些特点为开发人员开发强大的仿真系统提供了便利。
VRML (Virtual Reality Modeling Language, 虚拟现实造型语言) 包含了3D 动画、3D 音效、传感器触发、时间输入输出、行为控制、支持多种脚本与多重使用者等功能, 真正在Web 上实现了动态页面,并加强了互动功能, 达到真正的虚拟效果。VRML可以用在各行各业, 如创建虚拟城市、虚拟校园、虚拟超市、虚拟公司等。VRML210 的基本元素是节点,节点是组成3D场景的基本元素, 大约定义了50多个节点, 利用它们可以简单、轻松地创建虚拟的三维空间。
对VRML的访问是基于传统C/S模式扩展的B /S模式, B /S采用Internet上广泛使用的Web浏览器作为客户前端, 操作界面友好、一致。B /S的最大优势还在于其强大的跨平台移植能力, 能够极大地降低异构系统的开发难度。目前, VRML 主流编程是基于Java、 JavaScrip t, 特别是Java app let 小程序可以与VRML世界嵌在同一WEB 页上。EA I ( External Au2thoring Interface) , 是一种介于VRML 世界与外部环境的创作接口。通过EA I为VRML 与外部世界建立一个通信接口, 可以使用户通过这个接口真正成为VRML中的一个角色、一个参与者。EA I提供了一套针对VRML浏览器的Java类, 通过这些类, 外部环境可以访问当前所运行的VRML 世界, 还可以完成动态的添加、删除和驱动仿真实体等功能。
2.培训系统的体系结构
该培训系统是以韩国大宇PUMA200、215轴数控车削中心为具体仿真实例开发的。如图1所示为本文所述的虚拟数控车削中心加工仿真系统界面, 其中客户前端为Web浏览器, 浏览器左侧为提供功能模块选择的视图区, 右侧为对应的场景区。

图1 虚拟数控车削中心加工仿真系统界面
数控加工中心培训系统硬件设备由多媒体计算机、投影设备、USB通讯接口、音箱及电器小元件等构成。计算机最低配置为Pentium Ⅲ 550, 内存为128MB, 10 /100MB以太网卡, 可以满足动态三维图形较大的资源消耗。系统总体结构由操作仿真模块、视觉仿真模块、音响仿真模块、运动仿真模块组成, 如图2 所示。其中视景仿真模块是实现培训系统沉浸感的重要因素, 操作仿真模块是实现学员与虚拟数控机床之间交互作用的主要手段。

图2 系统总体结构
2.1 操作仿真模块
数控加工中心培训系统中控制面板的布置与实际的一样, 并与实际的面板有相近的动作范围和相似的力感, 如图3所示, 如转动手轮时有真实的手感, 按下按钮、拨动开关有真实的力感, 学员在看到加工过程中有异常情况可以按下急停键, 并且可以保持状态。操作过程中, 有些键必须配合使用, 如进给倍率与手轮的配合、刀号与换刀按钮的配合、主轴正反转与主轴启动的配合, 这些配合键使用的设置, 使操作更加接近实际操作情况。
2.2 视景仿真模块
视景仿真模块利用计算机图形图像技术和3D技术, 生成数控机床的各个部件, 如门、刀库及刀具、夹具、坯料、油管、散热孔等。为了使图像处理实时且逼真, 要选用高档的显卡、高性能的图形加速卡等硬件条件的支持, 更需要图形技术和开发平台的发展。视景仿真模块采用计算机平台和专用三维建模软件的三维图形开发技术。
图3 数控机床操作仿真面板
2.3 音响仿真模块
音响仿真模块利用计算机多媒体技术, 生成数控机床加工过程中的声音信息, 包括机床在加工工件中的声音信息、刀具进给的声音信息、主轴正反转的声音信息、装夹工件的声音信息以及换刀的声音信息。其中刀具进给声由进给倍率决定, 主轴转动声由主轴倍率决定。音响仿真系统采用支持多媒体保准接口的声卡取代专用的数字信号处理器, 具有通用性好、易移植、易升级等优点, 并且大大降低了系统成本。
2.4 运动仿真模块运动仿真模块通过模拟数控机床中的运动机构及其控制系统, 实现操作过程中逼真的感受, 如刀具进给时由于轨道不光滑产生的轻微晃动。运动仿真模块是提高培训系统逼真度的有效手段。建立虚拟数控机床作业环境, 可随意移动、旋转、缩放及变换视点,尤其是适用于三轴以上数控机床针对加工过程中过切及干涉的校验。数控车削中心运动仿真模块主要包括回参考点、刀具进给、主轴启动、卡盘松紧、选刀等。
3.仿真控制一体化平台的技术实现
3.1 技术实现方案
3.1.1 静态造型及机械动作的实现
首先对所研究的数控加工中心进行建模、仿真,利用Autodesk公司推出的最新版的三维动画与造型软件3DSMAX610对数控加工中心进行建模、静态造型。造型结束后, 根据部件运动时的状况设计动画。最后把3DSMAX文件转换成VRML 格式, 分析各个运动部件, 并进行时间分配, 调节 VRML 源代码中各个部件运动时间周期使之符合实际情况──实现机械部分的静态、动态造型。
3.1.2 电器控制开发过程

图4 总体硬件框图
根据数据采集与传输的特点, 我们充分利用了USB 技术的优点。自主开发的USB 高速多功能卡是基于USB 210协议的, 所以其速率可高达480Mbps, 完全满足高实时性的数据采集场合。实践证明该方案取得了良好的效果。总体硬件框图如图4所示。
3.1.3 CA I软件测试与安装
为了验证CA I软件的可行性, 我们与山东济南星科公司合作, 完成CA I软件在多台个人计算机上的安装, 测试了软件的稳定性和时间响应。经过长时间的调试, 系统的稳定性是可靠的, 时间响应也在允许范围之内。多家职业学校使用该软件进行专业学员的培训工作, 取得了良好的反响。
3.2 开发过程中的关键技术点
3.2.1 材质透明化处理
在VRML 空间中几何体的透明度是通过Material节点中transparency域的域值指定的, 其值从完全不透明表面的0.0 到完全透明表面的1.0。该域的缺省值为0,表明不透明。如图5所示, 材质的透明效果使得学生可以一目了然地看明白数控机床加工工件的过程, 增强了学生学习的兴趣。

图5 透明化处理效果
3.2.2 视点变换处理在VRML2.0中所谓视点就是浏览者在空间中所处的某一特定的位置和朝向, 在这个位置通过朝向,浏览者可以浏览到虚拟世界中相关的场景。用vrmlscrip t可以控制视点的变化, 使浏览者可以从当前视点快速切换到其它视点。在VRML 中先用DEF定义 Viewpoint节点, 然后再定义Scrip t, 具体代码如下:
DEF ss Scrip t
{ / /定义节点名
eventIn SFBool get_touch1
/ /Scrip t节点输入接口
eventOut SFBool set_view1
/ /Scrip t节点输出接口
url " vrmlscrip t: function get_touch1 ( ) { / /
url提供节点和程序之间的联系
set_view1 = 1; } " }
在该数控加工中心培训系统中, 运用视点转换,产生的效果如图6 所示。图6 ( a) 可以观看数控机床的整体, 对数控机床产生整体的印象; 图6 ( b)可以观看加工工件的过程以及插补情况; 图6 ( c)展示了加工工件时的G代码, 可以了解NC代码; 图6 ( d) 可以观看刀具回零点和换刀的情况。
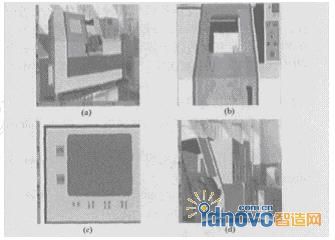
图6 视景的变换图
3.2.3 现场声音的设定VRML场景中可以添加声音, 与静态网页上的声音相比, VRML场景所播放的声音不是简单的2D声音, 而是有自己的声源, 以及模拟现实中的声音传播路径的3D 声音, 它会给人和现实中一样的听觉感应。VRML 所支持的声音文件有WAV、MID I 和MPEG - 1 文件, AudioClip 只支持前两种文件格式。利用AudioClip节点引入一个外部声音文件, 并规定这个声音文件的播放参数, 必须作为 Sound 节点的source域的域值来使用, Sound节点中的域值都可通过Java app let来重新设定。Sound节点格式如下:
Sound {
source DEF FeedSound AudioClip
{ / /引入一个外部声音文件节点
url " FeedSound1wav"
/ /指定声音文件的URL地址
descrip tion " FeedSound"/ /
指定一组描述所引用声音文件的文本
loop FALSE
/ /是否循环播放
tartTime 1
/ /所引用声音文件开始播放的绝对时间
p itch 1/ /
加快或减慢播放速度
intensity 1 / /声音强度
location 0 0 0 / /指定声源位置
direction 0 0 1 / /指定是否声音立体化
minBack 1 / /空间声源的最小后点
minFront 1 / /空间声源的最小前点
maxBack 1000000 / /空间声源的最大后点
maxFront 1000000 / /空间声源的最大前点
首先用MP3录制数控机床各种动作时的现场声音, 然后进行声音剪裁、分段。通过相应的声音节点在VRML世界需要的场合添加合适的声音, 使整个VRML世界更加具有真实感, 更加生动逼真、栩栩如生。
3.2.4 文件的优化措施
(1) 在不影响视觉效果的前提下, 简化设备结构。
(2) 对于复杂模型用模型优化器( op timizer或wingz或Gzip) 进行优化。
(3) 对于反复使用的部件, 可先对其命名(DEF) , 然后再重复使用(USE) 。
(4) 必要时使用帖图。
4.结论
本文介绍了数控加工中心培训系统的开发, 对于软件的结构体系、实现机理、关键技术作了详细的说明。该系统与使用录像和实物的传统培训系统相比,具有系统造价低、训练费用少、训练周期短、训练效果显著等特点, 对我国数控人才的培养起到了重要的推动作用。
通过该系统的学习和反复操作, 有利于启发学生的思维、培养学生逻辑判断能力和创造力, 同时能够提高教师教学质量。该系统软件开发出来后, 已被应用于山东部分职业学校、企业等单位, 并得到了不少专家、教师和学生的好评。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF