随着中国汽车行业的快速发展,各汽车厂为了尽可能早的抢占市场,对汽车模具的生产周期要求越来越短,精度要求越来越高,这就对模具设计以及制造等各个环节提出了更高的要求.随着CAD/CAM技术的深入应用,二维设计逐渐显现出越来越多的劣势,三维设计也就自然而然的成为国内汽车模具设计人员必须掌握的设计手段。对模型进行运动仿真也就有了依据。
UGNX自带的机构运动分析模块MOTION提供机构仿真分析和文档生成功能,可在UG环境定义机构,包括铰链、连杆、弹簧、阻尼、初始运动条件、添加阻力等,然后直接在UG中进行分析,仿真机构运动。设计人员可以分析反作用力、图解合成位移、速度、加速度曲线,反作用力可输入有限元分析。
采用UGNX自带的机构运动分析模块MOTION提供机构的仿真分析功能可以极其方便的对设计方案进行模拟、验证、修改、优化,彻底改变传统机械设计方案需要组织研究团队进行复杂设计计算,制造物理机验证结果的冗长过程,缩短生产周期,节约设计成本。一旦熟练的掌握了此方法,就可以在极短的时间内给出完整且极具说服力的设计方案。
接下来本文将结合模具实例介绍三维实体模具实现运动仿真的简单过程。图1是一套拉延模具的三维示意图。
第一步:数据准备阶段
在进行运动仿真模拟之前我们需要对已经设计好的三维模具进行简单的数据整理:由于模具设计工程师大都习惯按照最终工作状态来开展设计,然而进行运动仿真时我们一般都习惯于从非工作状态开始进行。这步操作很简单:假设这套模具在非工作状态所有的上模内容需要沿着Z轴正方向移动1000mm,压边圈组件的工作行程是120mm(需要沿着Z轴正方向移动120mm)。那么我们按着要求移动相关实体模型到指定位置即可。移动前后效果见图1和图2。

图1 模具工作状态

图2 模具非工作状态(打开状态)
第二步:进入运动仿真模块
数据准备完成以后我们首先要进入运动仿真模块才能进行相关操作。按照图3依次选择:起点----Motion Simulation即可。

图3 进入运动仿真模块操作界面
第三步:设置连杆机构
新建一个仿真:右击运动导航器(Motion Navigator)上装配文件名,选择New Simulation.在随后出现的对话框中直接选择确定。(如图4所示)

图4 新建仿真操作界面
接下来用鼠标右击Motion1,选择新连杆(如图5所示)。在接下来弹出的对话框中的名称栏位输入xmzj,同时将“固定连杆”选项前方框中打上对号(如图6所示),选中图7所示的所有三维实体后点击确定。(此部操作目的是将下模组件中的所有三维实体设置成1个相对地固定的连杆机构)

图5 新建连杆操作界面1

图6 新建连杆操作界面2
用同样的方法将图8所示的所有三维实体设置成名称为smzj的连杆机构,不过值得注意的是需要确认“固定连杆”选项前方框中不可以打上对号。
用同样的方法将图9所示的所有三维实体设置成名称为ybqzj的连杆机构,需要确认“固定连杆”选项前方框中不可以打上对号。

图7 xmzj连杆机构所包含的三维实体示意图

图8 smzj所包含的三维实体示意图

图9 ybqzj所包含的三维实体示意图
截止现在所有的连杆机构已经设置完成。
第四步:设置运动副
按照如图10所示用鼠标右击Joints,然后依次选择:新建…滑动副,在随后弹出的对话框中(如图11所示)的“名称”栏位输入“xmzj-yundong”,将方位设置成“-Z”方向,同时需要选中前面设置好的“xmzj” 连杆机构。然后需要在“驾驶员”选项卡的下拉菜单中选中“关节运动”。
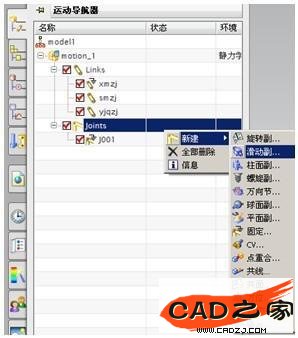
图10 新建运动副引导页面

图11 新建运动副操作界面
同样按照如图10所示用鼠标右击Joints,然后依次选择:新建…滑动副,在随后弹出的对话框中(如图11所示)的“名称”栏位输入“ybqzj-yundong”,将方位设置成“-Z”方向,同时需要选中前面设置好的“ybqzj” 连杆机构。然后需要在“驾驶员”选项卡的下拉菜单中选中“关节运动”。
截止现在所有的运动副已经设置完成。
第五步:建立解决方案
按照如图12所示用鼠标右击Motion1,然后依次选择:新建解决方案,将随后弹出的“解决方案”对话框中的“解决方案类型”设置为“关节运动”(如图13所示)。
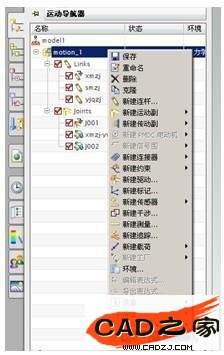
图12 新建运动副引导页面

图13 smzj所包含的三维实体示意图
第六步:对已经设置好的仿真求解
在主菜单依次选择分析…Motion…解算,在随后弹出的对话框中按照图14进行设置,设置完成以后点击“单步前进按钮”,接着按照图15进行设置,设置完成以后点击“取消”退出“关节运动”对话框。
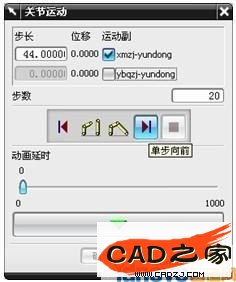
图14 “关节运动”对话框1
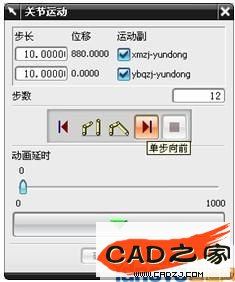
图15 “关节运动”对话框2
第七步:享受设置取得的成果
在主菜单依次选择分析…Motion…动画,在随后弹出的对话框中点击“播放”按钮即可享受一场从未见过的视觉盛宴。同时我们还可以在画面中动态测量某两个点的距离变化;查看运动过程中的干涉情况;可以设置成运动过程中如果遇到干涉情况停止运动;可以求出某些关键点的运动轨迹等。(如图16所示)

图16 “动画”对话框