3机械手建模与动态仿真分析
3.1机械手建模
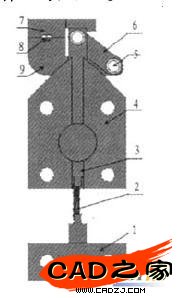
将初步确定尺寸的机构各件用SolidWorks建立模型,然后将其装配。并对部分尺寸进行修正,得机械手三维图,如图2所示。
机械手夹持孔依据测得的秧苗茎杆平均尺寸确定。据测定,黄瓜苗横向1. 72 mm,纵向1.76 mm,南瓜苗横向2.73 mm,纵向3.79 mm,因而确定穗木夹持孔为半径1.7 mm圆孔,砧木夹持孔为长3.8mm、宽2.7mm的矩形孔。另外,在夹持爪内侧与苗接触部分加装弹性好、表面粗糙的橡胶材料,以夹紧秧苗,这样并不影响嫁接秧苗的成活率。这是因为有研究表明,压缩变形小于20%时,对秧苗的成活率影响非常小。
3.2机械手动态仿直与分析
为了检验机械手的动作和运动情况,用SolidWorks软件的COSMOSMotion插件对其进行动态分析,仿真时不考虑销轴的影响,销轴联接的两个部件间直接定义为旋转副。
3.2.1定义约束和载荷。弹簧座板和掌板固定于地,连杆和内指、连杆和推杆、内指和掌板定义旋转副,推杆和掌板定义平移副。弹簧座板和推杆之间定义线性弹簧,弹簧刚度6.629 N·mm,长度20 mm,直径4 mm,丝径1 mm。在推杆上施加一个30 N的力,力的方向沿推杆。
3.2.2进行干涉检查和仿真。单击菜单"运动"~"干涉检查"选择机械手整个模型进行干涉检查,经检查机械手各件间不存在干涉。然后,单击菜单"运动"~"智能构建器"~"仿真",设置仿真"持续时间"为0.1 s,"帧的数目"为500,进行仿真,并将其运动过程制成AVI格式的动画演示结果表明,各机构部件的动作符合设计要求。
3.2.3仿真与结果的输出。为了确定秧苗夹持点的运动和落苗空间,跟踪内外指夹苗点轨迹并将其"输出CSV",用Excel将数据文件打开,并将数据传人Matlab,绘制出轨迹曲线如图3,4。
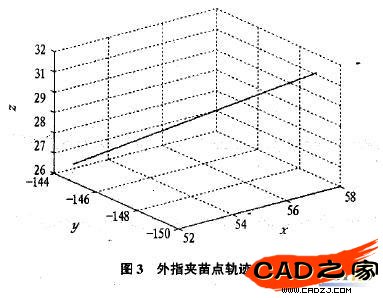
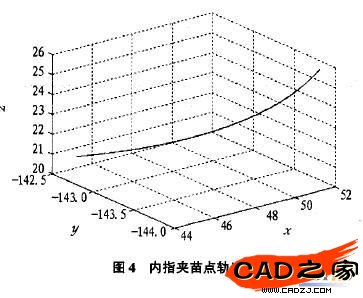
从内外指夹苗点轨迹可见,外指最大位移9 mm,内指塌大位移7 mm,喂入苗的空间是它们的和16 mm,不仅可以保证苗的喂入,同时也应满足苗嫁接完成后下落的需要。
4结论
根据嫁接机的总体工艺要求和嫁接用黄瓜苗、南瓜苗跳物理机械性质,设计了嫁接机械手的结构,并用SolidWorks软件建模,用COSMOSMotion插件进行了动态仿真分析,证明该机构及动作可满足设计要求。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF