1 引言
制动系统作为汽车安全系统,制动性能的好坏直接影响到汽车行驶的安全性,传统方法对制动性能好坏评价还集中在基础制动系统方面,主要有:1、制动效能;2、制动效能的恒定性;3、制动时的方向稳定性。但随着道路条件的逐步改善,车辆的平均行驶速度也逐渐提高,一个不容忽视的制动系统因素被逐渐重视起来,这就是制动系统反应时间。
制动系统反应时间是指在紧急情况下,从驾驶人员脚放置到制动踏板并开始踩踏开始,到最大制动力建立起(车轮抱死)为止这一段时间。
以时速120KPH 车辆为例,当这一反应时间由0.5 秒缩短到0.2 秒,车辆的制动总距离将减少10米,这是非常可观的一个数字。这里不对驾驶人员发现情况到抬脚到踏板这一段主观时间做研究。
制动系统反应时间主要由以下几个部分组成:1、制动钳的空行程;2、制动主缸空行程;3、助力器空行程;4、消除制动踏板各机械运动副之间间隙部分。而这几部分的空行程最终是要反应到制动踏板上的,也就是说制动踏板最初的一部分行程是用来消除各子系统的空行程,车辆并没开始减速。所以,如何缩短这一段反应时间的问题就可以转化为:如何缩短这几部分的空行程所对应的踏板行程(在此称为踏板空行程)。
为了燃油的经济性及行驶安全性,上述的几种空行程在车辆行驶中是必须存在的,所以缩短踏板空行程只能从踏板本身入手,因为踏板空行程这一段踏板力并不大,所以可以采用小的踏板杠杆比来缩短踏板空行程,踏板空行程控制在8-15mm 为最佳;当踏板空行程消除之后,整个系统液压建立,因为液体的不可压缩性,此时踏板力迅速增大,而踏板行程的增加则不明显,所以希望此时踏板有大的杠杆比,以实现较小的踏板力产生较大的制动液压的功能。
经过上面的分析,问题比较清晰了。希望得到一个杠杆比变化的踏板机构,这杠杆比的变化趋势是开始杠杆比小,而过踏板空行程之后杠杆比开始变大。杠杆比的变化反应出的是踏板行程与主缸活塞行程的关系曲线,所以以下都以踏板行程与主缸行程曲线作为输出进行研究。
2 动力学模型的建立
使用前处理软件 MotionView 建立制动踏板机构的运动学模型,在建模之前需要收集一些工程数据,包括制动踏板机构各铰接点坐标,以及通过人机工程得到的一些约束数据。以某车型为例,在MotionView 中建立制动踏板机构的多体动力学模型,如图1:
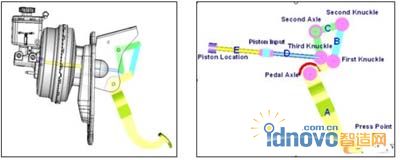
图 1 MotionView中制动踏板模型
制动踏板机构模型包括一个制动踏板、两个不同形状的连杆、一个推力杆和一个活塞杆,其约束关系见图2:
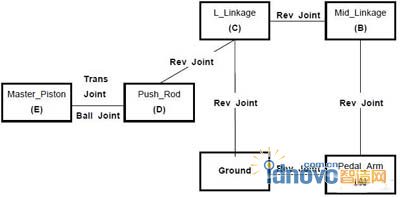
图 2 各部分约束关系
制动踏板行程由人机工程得到:直线距离130mm ,模型的模拟时间为:5s ,施加在Pedal Axle处的驱动是以速度控制的,其值为:0.04353×TIME 弧度/秒。
3 问题描述
原始模型的的踏板行程与活塞行程曲线如图3 所示,踏板行程与活塞行程呈弱线性关系。随着踏板行程的增大杠杆比没有增大反而减小。图4 是拟合后的理想目标曲线。
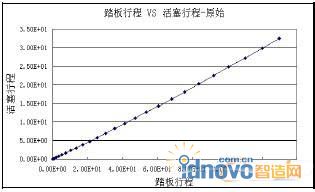
图 3 原始曲线

图 4 目标曲线
4 DOE 分析及优化
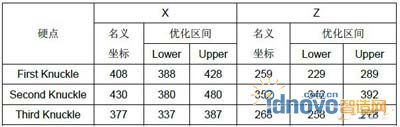
这里将 First Knuckle、Second Knuckle、Third Knuckle 三个点的X、Z 向坐标作为设计变量,则有六个设计变量。根据仪表板、转向管柱等部件的布置,最终确定出这三个点的优化区间,表1 列出了这三个点现在的名义坐标值及其优化区间。
表 1 优化硬点坐标及其优化区间
问题的响应为原始曲线与目标曲线两条曲线对应值的差的平方和。在这里采用3 水平的部分因子设计,实验安排及分析结果如表2 。
表 2 实验安排及响应值
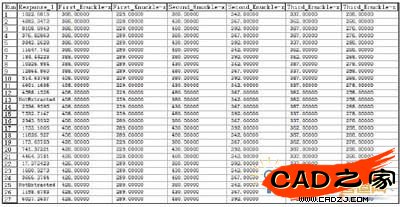
从DOE 分析结果可以看到:第13、25号组合是两个失效的样本点;第22号实验是一个近似的最优组合,见表3;将其代入模型验证,其结果见图3 。
表 3 根据 DOE 分析结果得到的最优组合

从图5 中可以看到,在踏板行程达到130mm 时,活塞的行程还没有达到目标行程。接下来继续做优化,由于模型较小,采用可行方向法直接在模型上进行优化,精度设为0.001 优化进程如图6 ,优化的结果见图7 。

图 5 DOE 优化后的位移关系曲线
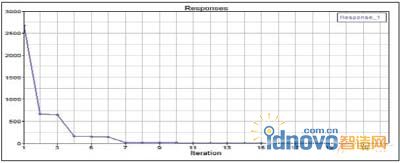
图 6 优化迭代进程
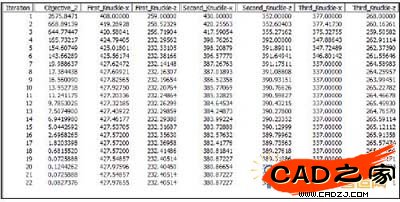
图 7 优化迭代结果
从图7 中可以看到最优化结果为第21 号实验,为了设计方便在此修正三个点的坐标,结果见表4 。
表 4 优化后的三点坐标及其修正坐标
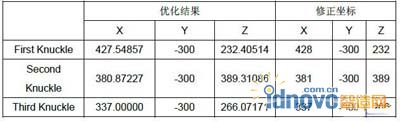
将修正好的坐标点导入模型进行运动学验证,其结果如图8 所示。
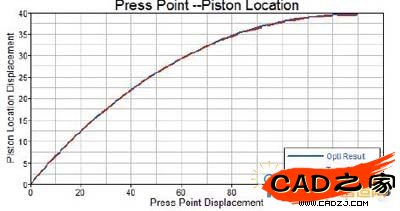
图 8 优化后模型运行结果
可以看出,优化的效果可接受。优化前后的模型比较见图9 。
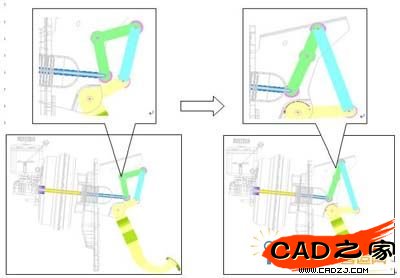
图 9 优化前后的模型比较
5 结论
经过优化,在踏板总行程不变的情况下,踏板与活塞的形成关系发生了很大变化,趋近于理想的输出曲线。该优化在只改动三个零件的情况下,最大限度的改善了对车辆踏板的感觉,提高了制动系统反应时间,降低了事故发生几率,同时有效地降低了在紧急制动时后半程的踏板力,改善了操纵人机工程。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF